
Исследователи Массачусетского технологического института разработали мягкий и жесткий роботизированный палец, который включает в себя мощные датчики по всей его длине, что позволило им создать роботизированную руку, которая могла бы точно идентифицировать объекты уже после одного захвата. Изображение: предоставлено исследователями
Адам Зеве | Офис новостей Массачусетского технологического института
Вдохновленные человеческим пальцем, исследователи Массачусетского технологического института разработали роботизированную руку, которая использует сенсорное восприятие с высоким разрешением для точной идентификации объекта после того, как он взял его всего один раз.
Многие роботизированные руки упаковывают все свои мощные датчики в кончики пальцев, поэтому объект должен полностью соприкасаться с этими кончиками пальцев, чтобы его можно было идентифицировать, что может потребовать нескольких захватов. В других конструкциях используются датчики с более низким разрешением, распределенные по всему пальцу, но они не фиксируют столько деталей, поэтому часто требуется несколько повторных захватов.
Вместо этого команда Массачусетского технологического института создала роботизированный палец с жестким скелетом, заключенным в мягкий внешний слой, который имеет несколько датчиков высокого разрешения, встроенных под его прозрачную «кожу». Датчики, которые используют камеру и светодиоды для сбора визуальной информации о форме объекта, обеспечивают непрерывное считывание по всей длине пальца. Каждый палец захватывает обширные данные о многих частях объекта одновременно.
Используя эту конструкцию, исследователи построили роботизированную руку с тремя пальцами, которая могла идентифицировать объекты после одного захвата с точностью около 85 процентов. Жесткий скелет делает пальцы достаточно сильными, чтобы поднимать тяжелые предметы, такие как дрель, а мягкая кожа позволяет им надежно сжимать податливые предметы, такие как пустая пластиковая бутылка из-под воды, не раздавливая их.
Эти мягкие и жесткие пальцы могут быть особенно полезны в роботе для ухода на дому, предназначенном для взаимодействия с пожилым человеком. Робот может поднять тяжелый предмет с полки той же рукой, которой он помогает человеку принять ванну.
«Наличие как мягких, так и жестких элементов очень важно для любой руки, но не менее важно иметь возможность выполнять отличное зондирование на действительно большой площади, особенно если мы хотим рассмотреть возможность выполнения очень сложных манипуляционных задач, таких как то, что могут сделать наши собственные руки. Наша цель в этой работе состояла в том, чтобы объединить все то, что делает наши человеческие руки такими хорошими, в роботизированном пальце, который может выполнять задачи, которые другие роботизированные пальцы в настоящее время не могут выполнять», — говорит аспирант машиностроения. Сандра Люсоавтор исследовательской работы о роботизированном пальце.
Лю написала статью вместе с соведущим автором и студентом бакалавриата машиностроения Леонардо Саморой Яньес и ее советником. Эдвард Адельсон, профессор Джона и Дороти Уилсон по науке о зрении на кафедре мозга и когнитивных наук и член Лаборатории компьютерных наук и искусственного интеллекта (CSAIL). Исследование будет представлено на конференции RoboSoft.
Палец, вдохновленный человеком
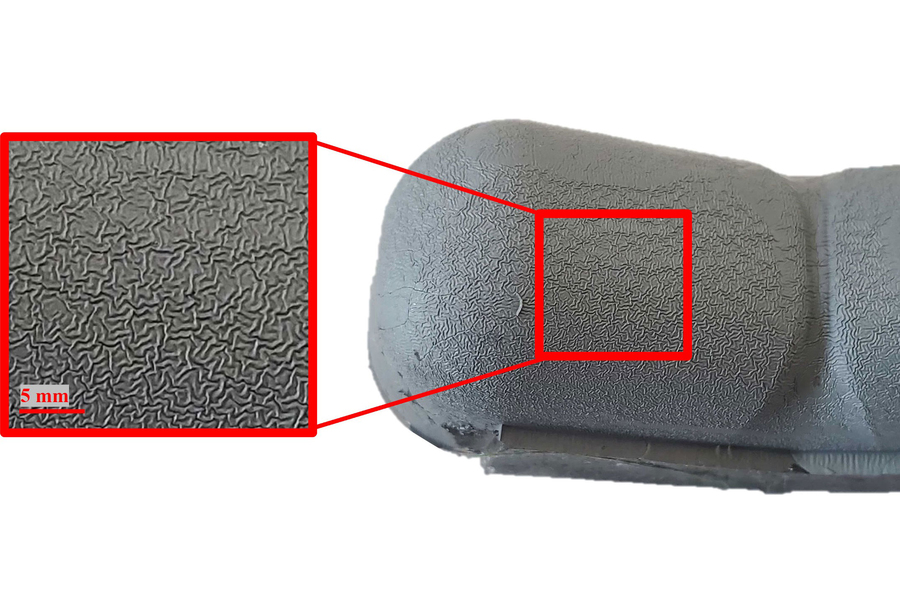
Роботизированный палец состоит из жесткого напечатанного на 3D-принтере эндоскелета, помещенного в форму и заключенного в прозрачную силиконовую «кожу». Создание пальца в форме устраняет необходимость в застежках или клеях, чтобы удерживать силикон на месте.
Исследователи разработали форму с изогнутой формой, поэтому пальцы робота слегка изогнуты в состоянии покоя, как человеческие пальцы.
«Силикон сминается при изгибе, поэтому мы подумали, что если мы отформуем палец в таком изогнутом положении, когда вы сгибаете его больше, чтобы схватить объект, вы не будете вызывать столько складок. Морщины в некотором роде хороши — они помогают пальцу скользить по поверхности легко и плавно, — но нам не нужны морщины, которые мы не можем контролировать», — говорит Лю.
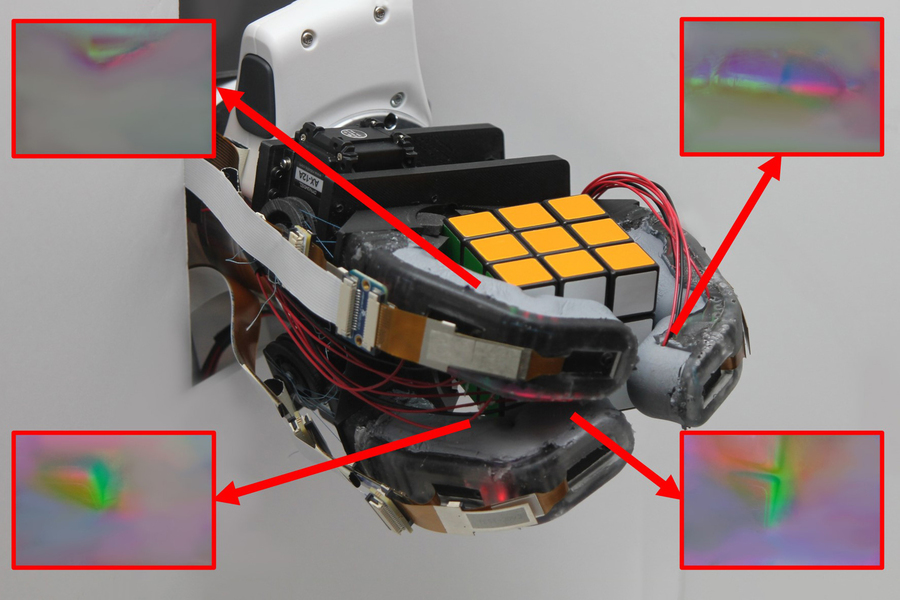
Эндоскелет каждого пальца содержит пару детализированных сенсорных датчиков, известных как датчики GelSight, встроенных в верхнюю и среднюю секции под прозрачной кожей. Сенсоры расположены таким образом, что диапазон камер слегка перекрывается, обеспечивая непрерывное считывание пальца по всей его длине.
Датчик GelSight, основанный на технологии, разработанной группой Adelson, состоит из камеры и трех цветных светодиодов. Когда палец захватывает объект, камера фиксирует изображение, поскольку цветные светодиоды подсвечивают кожу изнутри.
Изображение: предоставлено исследователями
Используя освещенные контуры, которые появляются на мягкой коже, алгоритм выполняет обратные вычисления, чтобы нанести на карту контуры на поверхности захваченного объекта. Исследователи обучили модель машинного обучения идентифицировать объекты, используя необработанные данные изображения с камеры.
Оттачивая процесс изготовления пальцев, исследователи столкнулись с рядом препятствий.
Во-первых, силикон имеет тенденцию со временем отслаиваться от поверхностей. Лю и ее сотрудники обнаружили, что они могут ограничить это отслоение, добавив небольшие изгибы вдоль шарниров между суставами в эндоскелете.
Когда палец сгибается, изгиб силикона распределяется по крошечным изгибам, что снижает нагрузку и предотвращает отслаивание. Они также добавили складки на суставы, чтобы силикон не сжимался так сильно, когда палец сгибается.
При устранении неполадок в их конструкции исследователи поняли, что морщины в силиконе предотвращают разрыв кожи.
«Полезность складок была с нашей стороны случайным открытием. Когда мы синтезировали их на поверхности, мы обнаружили, что они действительно делают палец более прочным, чем мы ожидали», — говорит она.
Получение хорошего понимания
После того, как они усовершенствовали конструкцию, исследователи построили роботизированную руку, используя два пальца, расположенных в форме буквы Y, а третий палец противостоял большому пальцу. Рука фиксирует шесть изображений, когда захватывает объект (по два с каждого пальца), и отправляет эти изображения в алгоритм машинного обучения, который использует их в качестве входных данных для идентификации объекта.
Так как рука обладает тактильным восприятием, охватывающим все пальцы, она может собирать обширные тактильные данные одним касанием.
«Хотя у нас много чувств в пальцах, возможно, добавление ладони с сенсорами поможет сделать тактильные различия еще лучше», — говорит Лю.
В будущем исследователи также хотят улучшить аппаратное обеспечение, чтобы уменьшить степень износа силикона с течением времени и добавить больше срабатывания большому пальцу, чтобы он мог выполнять более широкий спектр задач.
Эта работа была частично поддержана Исследовательским институтом Toyota, Управлением военно-морских исследований и проектом SINTEF BIFROST.

Новости Массачусетского технологического института