
Губка робота. Изображение предоставлено: Тяньци Юэ
Это простое в изготовлении устройство для защемления губки может помочь жестким роботам бережно обращаться с хрупкими предметами, имитируя тонкие прикосновения или переменную жесткость человека.
Роботы могут скакать, прыгать и кувыркаться, но они слишком жесткие, чтобы легко удерживать яйцо. Устройства с переменной жесткостью являются потенциальными решениями для обеспечения контактного соответствия жестких роботов для уменьшения повреждений или для повышения грузоподъемности мягких роботов.
Это исследование, опубликованное на Международной конференции IEEE по робототехнике и автоматизации (ICRA) 2023, показывает, что с помощью силиконовой губки можно добиться переменной жесткости.
Ведущий автор Тяньци Юэ из Бристоля Кафедра инженерной математики объяснил: «Жесткость, также известная как мягкость, важна в контактных сценариях.
«Роботы-манипуляторы слишком жесткие, поэтому они не могут так мягко, по-человечески обхватить хрупкие предметы, например, яйцо.
«Что отличает людей от роботов-манипуляторов, так это то, что у нас есть мягкие ткани, окружающие жесткие кости, которые действуют как естественный смягчающий механизм.
«В этой работе нам удалось разработать мягкое устройство с переменной жесткостью, которое крепится на конце манипулятора робота для обеспечения безопасного контакта робота с объектом».
Робот-губка в действии. Видео Кредит: Тяньци Юэ.
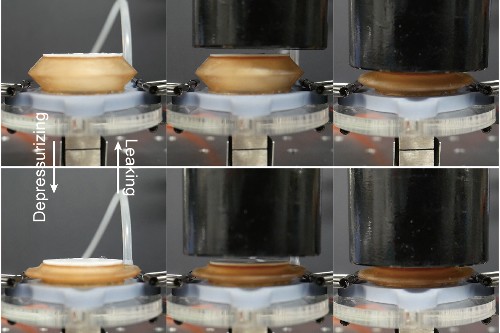
Силиконовая губка — дешевый и простой в изготовлении материал. Это пористый эластомер, похожий на чистящую губку, используемую в повседневных задачах.
Сжимая губку, губка становится жесткой, поэтому ее можно превратить в устройство с переменной жесткостью.
Это устройство может использоваться в промышленных роботах в сценариях, включающих захват желе, яиц и других хрупких веществ. Его также можно использовать в сервисных роботах, чтобы сделать взаимодействие человека и робота более безопасным.
Г-н Юэ добавил: «Нам удалось использовать губку для создания дешевого и ловкого, но эффективного устройства, которое может помочь роботам достичь мягкого контакта с объектами. Большой потенциал исходит из его низкой стоимости и легкого веса.
«Мы считаем, что это устройство с переменной жесткостью на основе силиконовой губки станет новым решением в промышленности и здравоохранении, например, для требований к регулируемой жесткости при роботизированной полировке и ультразвуковой визуализации».
Теперь команда рассмотрит возможность достижения устройством переменной жесткости в нескольких направлениях, включая вращение.
Доклад: «Устройство переменной жесткости на основе силиконовой губки» Тяньци Юэ на Международной конференции IEEE по робототехнике и автоматизации (ICRA) 2023.

Университет Бристоля – один из самых популярных и успешных университетов Великобритании.