
Источник: DALL·E 2 от OpenAI с подсказкой «гиперреалистичное изображение робота, читающего новости на ноутбуке в кофейне»
Добро пожаловать во второй выпуск Robo-Insight, выпуска новостей о робототехнике, который выходит раз в две недели! В этом посте мы рады поделиться рядом замечательных достижений в этой области, демонстрируя прогресс в картировании опасностей, ползании по поверхности, управлении насосом, адаптивном захвате, хирургии, оказании медицинской помощи и добыче полезных ископаемых. Эти разработки иллюстрируют непрерывную эволюцию и потенциал робототехники.
Улучшение картирования опасностей благодаря сотрудничеству с роботами
В области картирования опасностей, исследователи разработали совместную схему, в которой используются как наземные, так и воздушные роботы для картирования опасностей загрязненных территорий. Команда улучшила качество карт плотности и снизила ошибки оценки, используя метод управления неоднородным покрытием. По сравнению с однородными альтернативами стратегия оптимизирует развертывание роботов на основе уникальных характеристик каждого из них, обеспечивая более точные оценки и более короткое время работы. Это исследование имеет важные последствия для тактики реагирования на опасности, позволяя совместным роботизированным системам более эффективно и точно отображать опасные соединения.
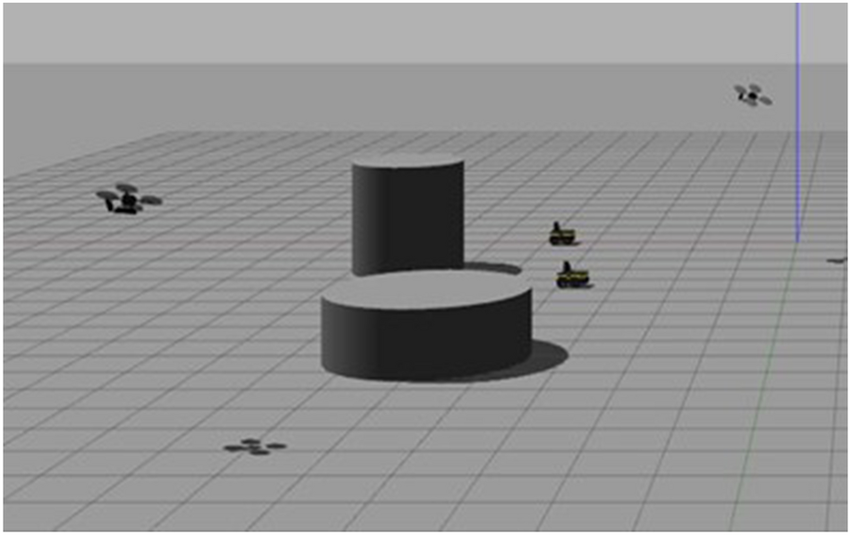
Среда, в которой моделируется модель. Источник.
Новый биоинспирированный гусеничный робот
А если говорить о наземных роботах, то специальный мягкий робот, созданный исследователи из Университета Карнеги-Меллона, сочетает в себе модели походки морских звезд и гекконов. Этот инновационный робот демонстрирует улучшенную способность ползать по различным поверхностям, включая склоны, используя движения конечностей, вдохновленные морскими звездами, и липкие пятна, вдохновленные гекконами. Способность робота прилипать к поверхностям и перемещаться достигается за счет интеграции пневматических приводов и специально разработанных пятен геккона. Этот прорыв в мягкой робототехнике имеет потенциал для широкого спектра применений, особенно в водной среде.
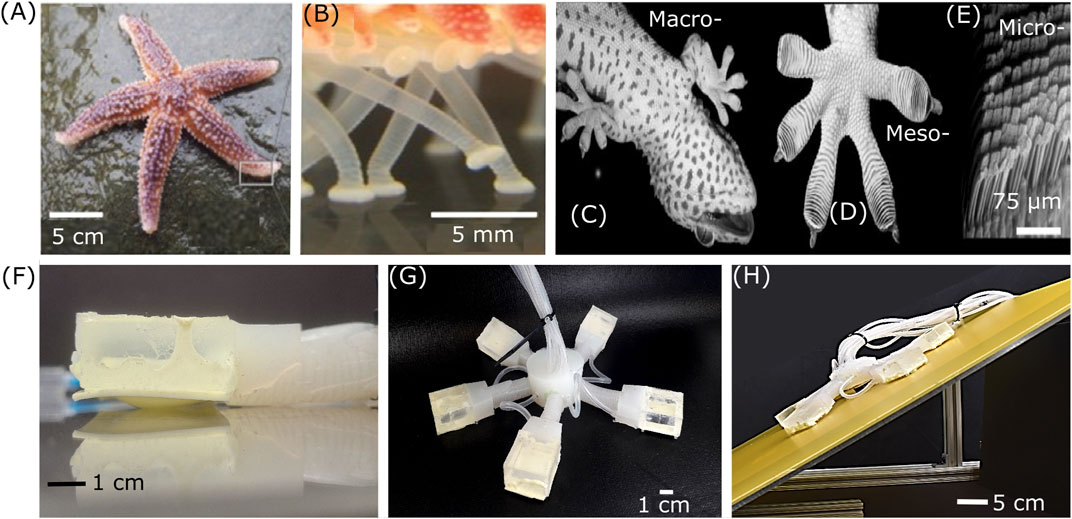
Образы биовдохновения. Источник.
Новые насосы для мягких роботов, используемых для коктейлей
Также в отношении мягкой робототехники, Исследователи Гарвардского университета создали компактный, мягкий перистальтический насос, который решает основную проблему громоздких и жестких силовых компонентов в области мягкой робототехники. Насос может работать с различными жидкостями с различной вязкостью и имеет изменяемый напор благодаря приводу из диэлектрического эластомера с электрическим приводом. Помпу можно использовать для приготовления коктейлей. Однако его применение также намного шире, поскольку его можно использовать в производстве, биологической терапии и обработке пищевых продуктов из-за его небольшого размера и адаптируемости. Улучшение создает новые возможности для мягких роботов для выполнения деликатной работы и маневрирования в сложных условиях.

Мягкий насос, который может питать роботов. Источник: Гарвард
Роботизированные кончики пальцев с возможностью изменения формы
Смещая наше внимание на роботизированный захват с использованием витримерных полимеров с памятью формы, исследователи из Brubotics, Брюссельского свободного университета и Imec создали адаптирующиеся к форме кончики пальцев для роботизированных захватов. При воздействии определенных обстоятельств эти полимеры могут обратимо изменить свои механические характеристики. Для деликатных предметов кончики пальцев изогнуты, а для твердых тел кончики пальцев прямые. Нагревая кончики пальцев, адаптирующиеся к форме, выше их температуры стеклования и изменяя их форму с помощью внешних сил, можно запрограммировать кончики пальцев. Исследователи показали, что кончики пальцев могут хватать и перемещать объекты различной формы, что является перспективным для адаптивных сортировочных и производственных линий.
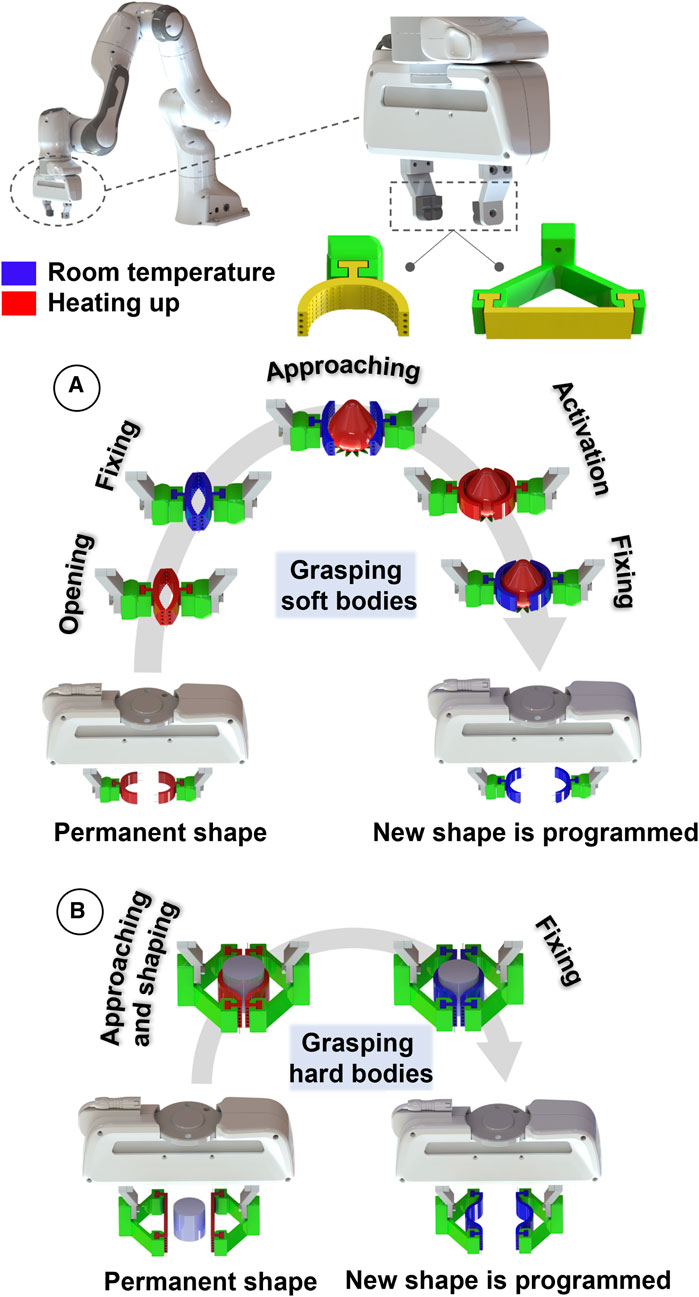
Процесс адаптации формы, Источник
ChatGPT используется как ключевой инструмент для продвижения роботизированной хирургии
В области роботизированной хирургии, чтобы улучшить доступность и функциональность хирургического робота да Винчи, исследователи из Университета штата УэйнНедавно я разработал интерфейс с поддержкой ChatGPT. Сила языковой модели ChatGPT позволяет системе понимать команды хирурга на естественном языке и реагировать на них. Реализация позволяет выполнять такие команды, как отслеживание хирургических инструментов, поиск инструментов, фотографирование и запуск/остановка видеозаписи, обеспечивая простое и удобное взаимодействие с роботом. Несмотря на то, что точность и полезность системы были многообещающими, все еще остаются проблемы, требующие решения, такие как задержка в сети, ошибки и контроль над ответами модели. Долгосрочные эффекты и предполагаемое влияние интерфейса на естественном языке в хирургических условиях необходимо оценивать с помощью дополнительных исследований и разработок.
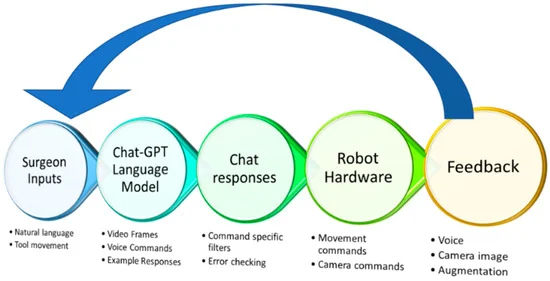
Это показывает процесс, через который проходит модель. Источник
Носимый робот, который может выступать в качестве личного помощника по здоровью
Говоря о роботах в здравоохранении, исследователи из Мэрилендского университета разработали Calico, небольшого носимого робота, который может прикрепляться к одежде и выполнять различные задачи по оказанию медицинской помощи. При весе всего 18 грамм Calico может выступать в качестве стетоскопа, отслеживать жизненные показатели и направлять пользователей в фитнес-программах. Внедряя неодимовые магниты в трекер одежды, робот может определять свое местоположение и планировать путь по телу. Благодаря грузоподъемности 20 грамм и скорости до 227 мм/с, Calico обладает многообещающим потенциалом для мониторинга и оказания медицинской помощи в будущем.

Бязь поверх одежды. Источник: Университет Мэриленда
Швейцарские роботы объединяют усилия для разведки полезных ископаемых
Наконец, в области добычи лунного материала, роботы на ногах разрабатываются Швейцарские инженеры из ETH Zurich в рамках новаторских исследований, чтобы подготовить их к поездкам на Луну для разведки полезных ископаемых. Исследователи обучают роботов совместной работе, чтобы гарантировать их полезность даже в случае сбоев. Команда намерена максимально повысить производительность и учесть любые недостатки, объединив экспертов и универсального робота, оснащенного различными измерительными и аналитическими инструментами. Исследователи также увеличат автономию роботов, что позволит им делегировать работу друг другу, сохраняя при этом возможности контроля и вмешательства для операторов.

Изображение тройки роботов на ногах во время испытаний в швейцарском гравийном карьере. (Фото: ETH Zurich/Такахиро Мики) Источник: Высшая техническая школа Цюриха
Эти недавние достижения в различных областях демонстрируют разнообразный и развивающийся характер технологий робототехники, открывая новые возможности для приложений в различных отраслях. Непрерывный прогресс в области робототехники демонстрирует инновационные усилия и потенциальное влияние этих технологий на будущее.
Источники:
- Агунг Нугрохо Джати, Бамбанг Риянто Трилаксоно, Мухаммад Э. и Видьявардана Адиправита. (2023). Совместные наземные и воздушные роботы для картографирования опасностей на основе неоднородного покрытия.
- Ачарья С., Робертс П., Ране Т., Сингхал Р., Хонг П., Ранаде В., Маджиди К., Вебстер-Вуд В. и Риджа-Джаян Б. ( 2023, 16 июня). Гусеничный робот морской звезды на основе адгезии Gecko.
- Насос питает мягких роботов, готовит коктейли. (й). Seas.harvard.edu. Проверено 19 июля 2023 г.
- Кашеф Табрициан, С., Алабисо, В., Шаукат, У., Террин, С., Россеггер, Э., Бранкарт, Дж., Легран, Дж., Шлёгль, С., и Вандерборхт, Б. (2023, июнь 30). Кончики пальцев на основе полимера с памятью формы VITRIMERIC для адаптивного захвата. Границы.
- Пандья, А. (2023). Прототип хирургического робота daVinci с поддержкой ChatGPT: улучшения и ограничения. Робототехника, 12(4), 97.
- Носимый робот-помощник, который всегда рядом с вами. (й). Robotics.umd.edu. Проверено 19 июля 2023 г.
- Команда роботов отправится в путешествие по Луне. (2023, 12 июля).

Шонак Капур входит в команду волонтеров Robohub и скоро станет старшеклассником (Техас). Шон был очарован робототехникой с юных лет.
Шонак Капур входит в команду волонтеров Robohub и скоро станет старшеклассником (Техас). Шон был очарован робототехникой с юных лет.