
Группа автономных исследований CMU разработала набор роботизированных систем и планировщиков, позволяющих роботам быстрее исследовать, исследовать самые темные уголки неизвестной среды и создавать более точные и подробные карты — и все это без помощи человека.
Аарон Опперли
Исследовательская группа Университета Карнеги-Меллона Институт робототехники создает новое поколение исследователей — роботов.
Автономная исследовательская группа разработала набор роботизированных систем и планировщиков, позволяющих роботам быстрее исследовать, исследовать самые темные уголки неизвестной среды и создавать более точные и подробные карты. Системы позволяют роботам делать все это автономно, находя дорогу и создавая карту без вмешательства человека.
«Вы можете установить его в любой среде, например, в универмаге или в жилом доме после стихийного бедствия, и все готово», — сказал он. Цзи Чжан, системный ученый в Институте робототехники. «Он строит карту в режиме реального времени и во время исследования выясняет, куда он хочет двигаться дальше. На карте все видно. Вам даже не нужно заходить в помещение. Просто позвольте роботам исследовать и составлять карту окружающей среды».
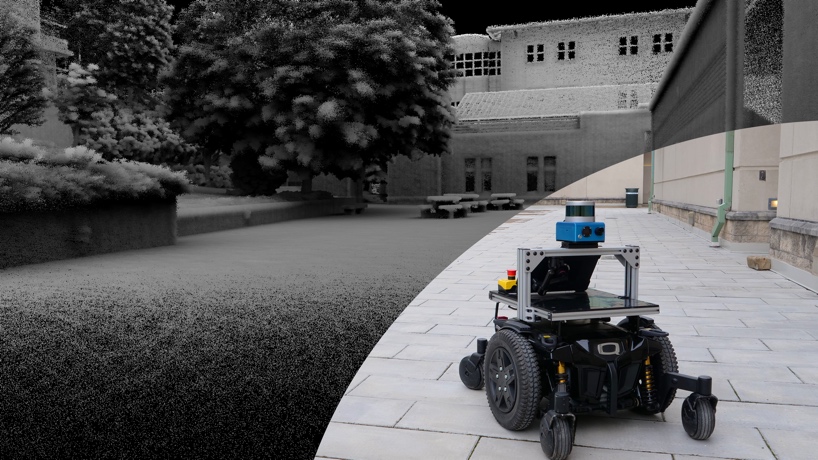
Команда работала над разведывательными системами более трех лет. Они исследовали и нанесли на карту несколько подземных шахт, гараж, Университетский центр Кохон, а также несколько других крытых и открытых помещений в кампусе CMU. Компьютеры и датчики системы можно подключить практически к любой роботизированной платформе, превратив ее в современный исследователь. Группа использует модифицированное моторизованное инвалидное кресло и дроны для большей части своих испытаний.
Роботы могут исследовать в трех режимах, используя системы группы. В одном режиме человек может управлять движениями и направлением робота, а автономные системы не дают ему врезаться в стены, потолки или другие объекты. В другом режиме человек может выбрать точку на карте, и робот направится к этой точке. Третий режим — чистое исследование. Робот отправляется в путь самостоятельно, исследует все пространство и создает карту.
«Это очень гибкая система, которую можно использовать во многих приложениях, от доставки до поисково-спасательных операций», — сказал он. Хоуи Чосетпрофессор Института робототехники.
Группа объединила датчик 3D-сканирующего лидара, переднюю камеру и датчики инерциального измерительного блока с алгоритмом исследования, чтобы позволить роботу узнать, где он находится, где он был и куда он должен двигаться дальше. Полученные системы значительно эффективнее предыдущих подходов, создавая более полные карты и вдвое сокращая время выполнения алгоритма.
Новые системы работают в условиях низкой освещенности, в коварных условиях, где связь ненадежна, например, в пещерах, туннелях и заброшенных строениях. Версия исследовательской системы группы с питанием Исследователь команды, запись CMU и Орегонского государственного университета в DARPA’s Subterranean Challenge. Team Explorer заняла четвертое место в финальном соревновании, но выиграла награду «Самое исследованное количество секторов» за картографирование большей части маршрута, чем любая другая команда.
«Вся наша работа находится в открытом доступе. Мы ничего не сдерживаем. Мы хотим укрепить общество возможностями создания автономных исследовательских роботов», — сказал он. Чао Цао, доктор философии студент робототехники и ведущий оператор Team Explorer. «Это фундаментальная способность. Если у вас есть это, вы можете сделать гораздо больше».
Последняя работа группы появилась в Научная робототехникакоторая опубликовала «Дробленность представления позволяет экономить время на автономном исследовании больших и сложных миров» В сети. Прошлые работы получили высшие награды на престижных конференциях по робототехнике. «TARE: иерархическая структура для эффективного изучения сложных 3D-сред» получила награды «Лучшая статья» и «Лучшая статья по системам» на конференции Robotics Science and Systems в 2021 году. Впервые в истории конференции статья получила обе награды. «FAR Planner: быстрый и удобный планировщик маршрутов с использованием динамического обновления видимости» получил награду за лучшую студенческую работу на Международной конференции по интеллектуальным роботам и системам в 2022 году.
Более подробная информация доступна на сайт группы.

Университет Карнеги Меллон