
Источник: DALL·E 2 от OpenAI с подсказкой «гиперреалистичное изображение робота, читающего новости на ноутбуке в кафе»
Добро пожаловать в пятый выпуск Robo-Insight, новостей о робототехнике! В этом посте мы рады поделиться рядом новых достижений в этой области и осветить прогресс роботов в таких областях, как взаимодействие человека и робота, гибкое движение, усовершенствованные методы обучения, мягкая робототехника, хирургия головного мозга, медицинская навигация и экологические исследования.
Новые инструменты взаимодействия человека и робота
В сфере взаимодействия человека и робота исследователи со всей Европы разработали новый инструмент под названием HEUROBOX для оценки взаимодействий. HEUROBOX предлагает 84 базовых и 228 расширенных эвристик для оценки различных аспектов взаимодействия человека и робота, таких как безопасность, эргономика, функциональность и интерфейсы. Он уделяет большое внимание дизайну, ориентированному на человека, обращая внимание на жизненно важную связь между технологиями и человеческим фактором. Этот инструмент призван облегчить беспрепятственное сотрудничество между людьми и роботами в промышленных условиях, обеспечивая соответствие роботов человеческим возможностям и потребностям, уделяя особое внимание производительности и благополучию.
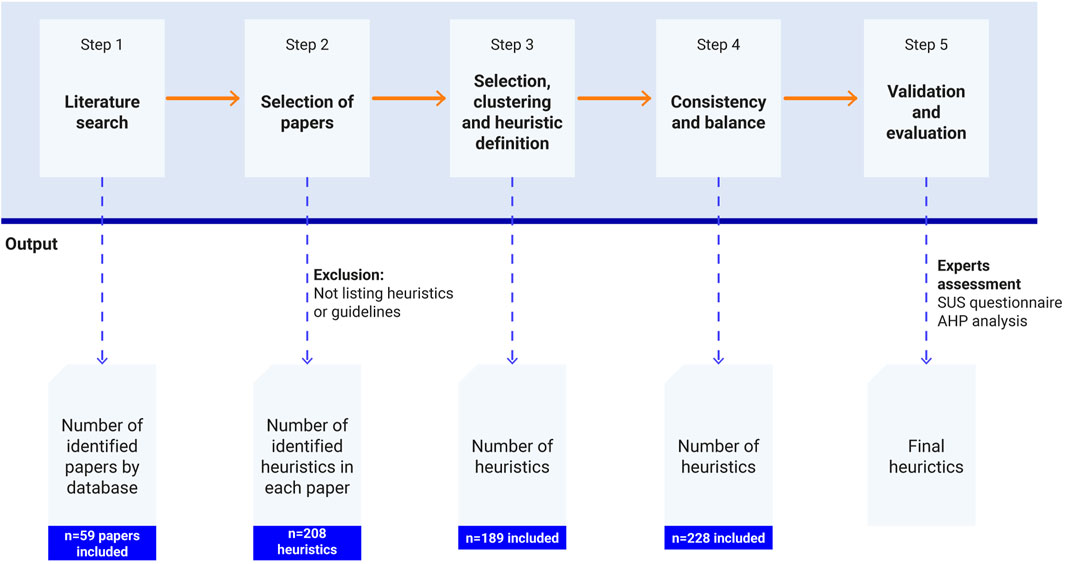
Подход к созданию нового метода оценки эвристики взаимодействия человека и робота (HRI). Источник.
Инновации для улучшения управления в гибкой робототехнике
Смещая наше внимание на гибких роботов, исследователи из Чжэцзянского университета разработали змееподобного робота с тросовым приводом для эффективного передвижения в ограниченном пространстве. Этот робот использует датчики силы и датчики угла для достижения точного двухконтурного управления. Сочетая обратную связь по позе от датчиков угла и обратную связь по силе от датчиков, эта стратегия управления повышает точность робота и обеспечивает усилие и жесткость троса, гарантируя стабильность и надежность во время движения. Эта инновация имеет значительный потенциал для различных применений, включая минимально инвазивную хирургию, обращение с ядерными отходами, космические инспекции и поисково-спасательные операции в сложных условиях. Стратегия проектирования и управления роботом обещает прогресс в области высокоточных роботизированных систем для инженерных приложений.
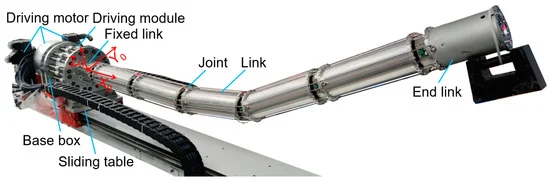
Обзор КСО. Источник.
Лучшие методы обучения гибкой робототехнике
Продолжая работать в области гибкой робототехники, исследователи из Цюрихского университета недавно расширили границы этого типа роботов, сосредоточив внимание на ключевой роли систем управления внутри них. В их исследовании были сопоставлены две ключевые методологии: оптимальное управление на основе моделей (OC) и обучение с подкреплением (RL). Удивительно, но RL, который позволяет роботам учиться методом проб и ошибок, одержал победу в сложном реальном испытании: автономных гонках дронов. RL не только превзошел возможности человека, но и превзошел его: маневренный дрон достиг удивительного максимального ускорения, в 12 раз превышающего гравитационное ускорение, и поразительной максимальной скорости 108 километров в час. Эти результаты освещают многообещающее будущее гибкой робототехники, где ориентированные на обучение подходы, такие как RL, открывают путь к более эффективному управлению и производительность в различных приложениях.

Визуальное развитие показывает, как быстро мчащийся дрон с течением времени управляется стратегией RL. Источник.
Новые сильные и жесткие мягкие роботы.
Недавно мы переключили внимание на мир мягкой робототехники. исследователи из Национального университета Канвондо представили робота с мягким захватом, способным изменять его жесткость, решая серьезную проблему в области мягкой робототехники. В отличие от сложных конструкций, в этом захвате изменение жесткости достигается за счет простого механизма, включающего пневматическое управление и сухожилия, приводимые в действие шаговыми двигателями. Это нововведение позволяет захвату адаптироваться к объектам различной формы, размера и веса, расширяя его потенциальные возможности применения. Исследование показывает, что этот захват может увеличить свою жесткость до 145% и выдерживать вес до 2,075 кг. Мягкая робототехника, вдохновленная природными организмами, перспективна в здравоохранении, производстве, геологоразведке и других областях, и эти исследования способствуют ее развитию.
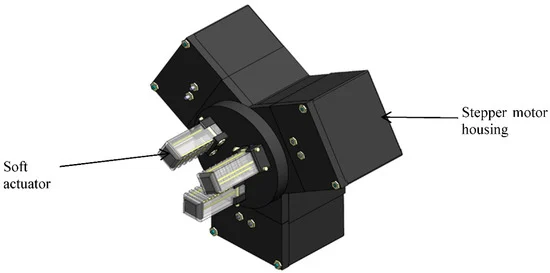
САПР-проектирование захватного механизма. Источник.
Усовершенствованные роботы для хирургии головного мозга
Обращая наше внимание на мир медицинской робототехники, исследователи из Гарвардской медицинской школы разработали роботизированное устройство, способное улучшить нейрохирургию, сделав ее менее инвазивной. Команда представила нового двурукого эндоскопического робота, управляемого джойстиком, который имитирует ловкость открытой хирургии, но с меньшими разрезами. Это нововведение было опробовано в контексте резекции опухоли головного мозга — типично инвазивной процедуры. По сравнению с обычными ручными эндоскопическими инструментами робот обеспечивал больший доступ к хирургическому полю, позволяя выполнять бимануальные операции без сжатия тканей головного мозга и зачастую выполнять задачи быстрее. Эти результаты открывают дверь к потенциальной трансформации традиционно открытых операций на головном мозге в менее инвазивные эндоскопические процедуры.
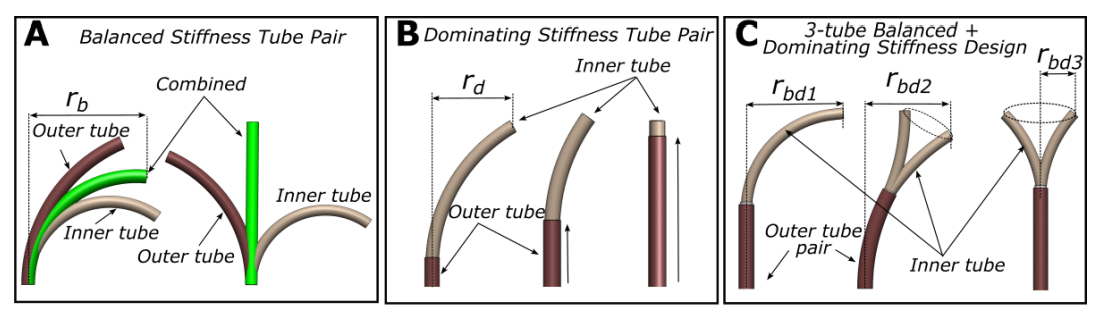
Роботизированные трубчатые руки различной степени жесткости. Источник.
Усовершенствованная игла для робототехники
Аналогично достижениям в области медицинской робототехники, группа исследователей под руководством профессора Рона Альтеровица из Университета Северной Каролины в Чапел-Хилл разработала автономную роботизированную иглу, предназначенную для прохождения через сложную легочную ткань, избегая при этом препятствий и важных легочных структур. Игла использует искусственный интеллект и компьютерное зрение для автономного прохождения через живые ткани, что делает ее потенциально ценным инструментом для точных медицинских процедур, таких как биопсия и целевая доставка лекарств. Эта разработка представляет собой значительный шаг в области медицинской робототехники, предлагая повышенную точность и безопасность минимально инвазивных процедур. Исследователи планируют дальнейшее совершенствование технологии и изучение дополнительных медицинских применений.
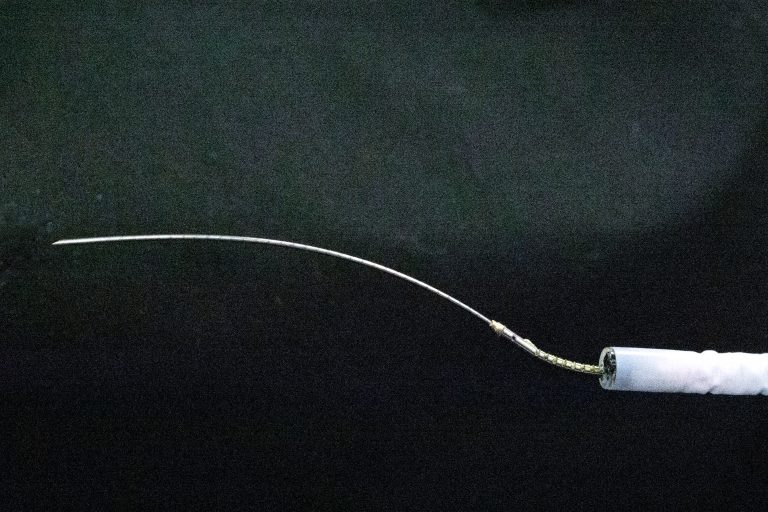
Роботизированная игла, выходящая из бронхоскопа. Источник.
Роботы могли бы пчела ключ к экологическим исследованиям
Наконец, в экологической сфере робототехника исследователи из Даремского университета объединяются с экспертами из различных дисциплин, чтобы исследовать, как животные адаптируются к экологическим проблемам, с целью смягчения глобальной потери биоразнообразия. Возглавляя проект RoboRoyale, доктор Фаршад Арвин объединяет миниатюрную робототехнику, искусственный интеллект и машинное обучение для разработки роботов-пчёл. Эти пчелы-роботы предназначены для взаимодействия с пчелиными матками, улучшая их яйценоскость и выработку феромонов, что влияет на поведение улья. Этот уникальный проект ориентирован исключительно на пчелиных маток с использованием системы из нескольких роботов, которая со временем учится оптимизировать их благополучие. Одновременно проект MammalWeb собирает изображения с камер-ловушек для мониторинга привычек и поведения млекопитающих Великобритании, изучая влияние изменения климата и деятельности человека на биоразнообразие. Эти инициативы представляют собой новаторский вклад сообщества робототехники в экологические исследования.
Роботизированное устройство разработки. Источник.
Непрерывная эволюция в различных секторах подчеркивает адаптируемый и постоянно развивающийся характер робототехники, открывая новые возможности для ее интеграции в различные отрасли. Постепенный рост в области робототехники отражает устойчивую приверженность делу и дает представление о потенциальных последствиях этих разработок для будущего.
Источники:
- Апраиз А., Мулет Альберола Дж. А., Ласа Г., Мазмела М. и Нгуен Х. Н. (16 августа 2023 г.). Разработка нового набора эвристик для оценки взаимодействия человека и робота в промышленных условиях: опыт эвристических роботов (HEUROBOX). Границы.
- Сюй X., Ван Ч., Се Х., Ван Ч. и Ян Х. (4 сентября 2023 г.). Двухконтурное управление змееподобными роботами с тросовым приводом. МДПИ.
- Сонг Ю., Ромеро А., Маттиас Мюллер, Колтун В. и Давиде Скарамуцца. (2023). Достижение предела в автономных гонках: оптимальный контроль против обучения с подкреплением. Научная робототехника, 8(82).
- Мава, С.К., и Парк, Ю.-Дж. (2023, 11 сентября). Пневматический робот с мягким захватом с сухожильным приводом и переменной жесткостью. МДПИ.
- Прайс К., Пейн Дж., Менкаттелли М., Яш Читалия, Пу Д., Луи Т., Стоун С., Дрейк Дж. М. и Дюпон П. Е. (2023). Использование робототехники для перемещения рук нейрохирурга к кончику эндоскопа. Научная робототехника, 8(82).
- Автономный медицинский робот успешно проводит иглами через живую ткань. (без даты). Информатика. Проверено 23 сентября 2023 г.
- Университет, Д. (nd). Компьютерные исследования по созданию роботизированных пчел и мониторингу млекопитающих – Даремский университет. www.durham.ac.uk. Проверено 23 сентября 2023 г.

Шонак Капур — член волонтерской команды Робохуба и скоро учится в старшей школе (Техас). Шон был очарован робототехникой с юных лет.
Шонак Капур — член волонтерской команды Робохуба и скоро учится в старшей школе (Техас). Шон был очарован робототехникой с юных лет.