
Источник: DALL·E 2 от OpenAI с подсказкой «гиперреалистичное изображение робота, читающего новости на ноутбуке в кафе»
Добро пожаловать в шестой выпуск Robo-Insight, новостей о робототехнике! В этом посте мы рады поделиться рядом новых достижений в этой области и осветить прогресс роботов в таких областях, как медицинская помощь, протезирование, гибкость роботов, движение суставов, производительность труда, дизайн искусственного интеллекта и чистота в доме.
Роботы, которые могут помочь медсестрам
В медицинском мире, исследователи из Германии разработали роботизированную систему, призванную помочь медсестрам снять физическое напряжение, связанное с уходом за пациентами. Медсестры часто сталкиваются с высокими физическими нагрузками при уходе за лежачими пациентами, особенно при выполнении таких задач, как изменение их положения. Их работа исследует, как роботизированные технологии могут помочь в таких задачах, дистанционно фиксируя пациентов в боковом положении. Результаты показывают, что система улучшила рабочее положение медсестер в среднем на 11,93% и была оценена как удобная для пользователя. Исследование подчеркивает потенциал робототехники для поддержки лиц, осуществляющих уход в медицинских учреждениях, улучшая как условия работы медсестер, так и уход за пациентами.
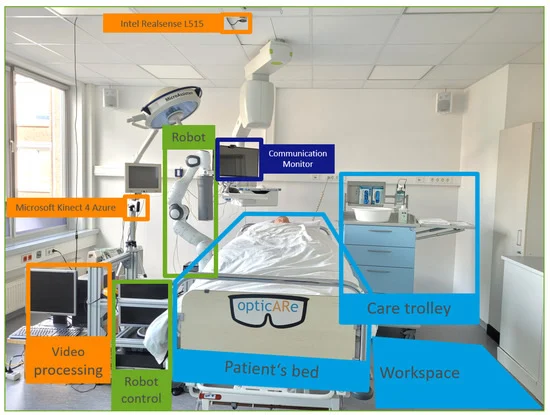
Обустройство палаты пациента, используемой в исследовании. Источник.
Роботы улучшают бионическое управление руками
В последнее время уделяем особое внимание здравоохранению. исследователи из многочисленных европейских институтов добились значительного прорыва в технологии роботизированного протезирования, поскольку успешно имплантировали нервно-мышечный протез — бионическую руку, напрямую связанную с нервной и скелетной системами пользователя, человеку с ампутацией ниже локтя. Это достижение включало хирургические процедуры по установке титановых имплантатов в лучевую и локтевую кости и перенос отрезанных нервов в свободные мышечные трансплантаты. Эти нейронные интерфейсы обеспечили прямую связь между протезом и телом пользователя, что позволило улучшить функцию протеза и повысить качество жизни. Их работа демонстрирует потенциал высокоинтегрированных протезов для улучшения жизни людей с ампутированными конечностями за счет надежного нейронного контроля и комфортного повседневного использования.
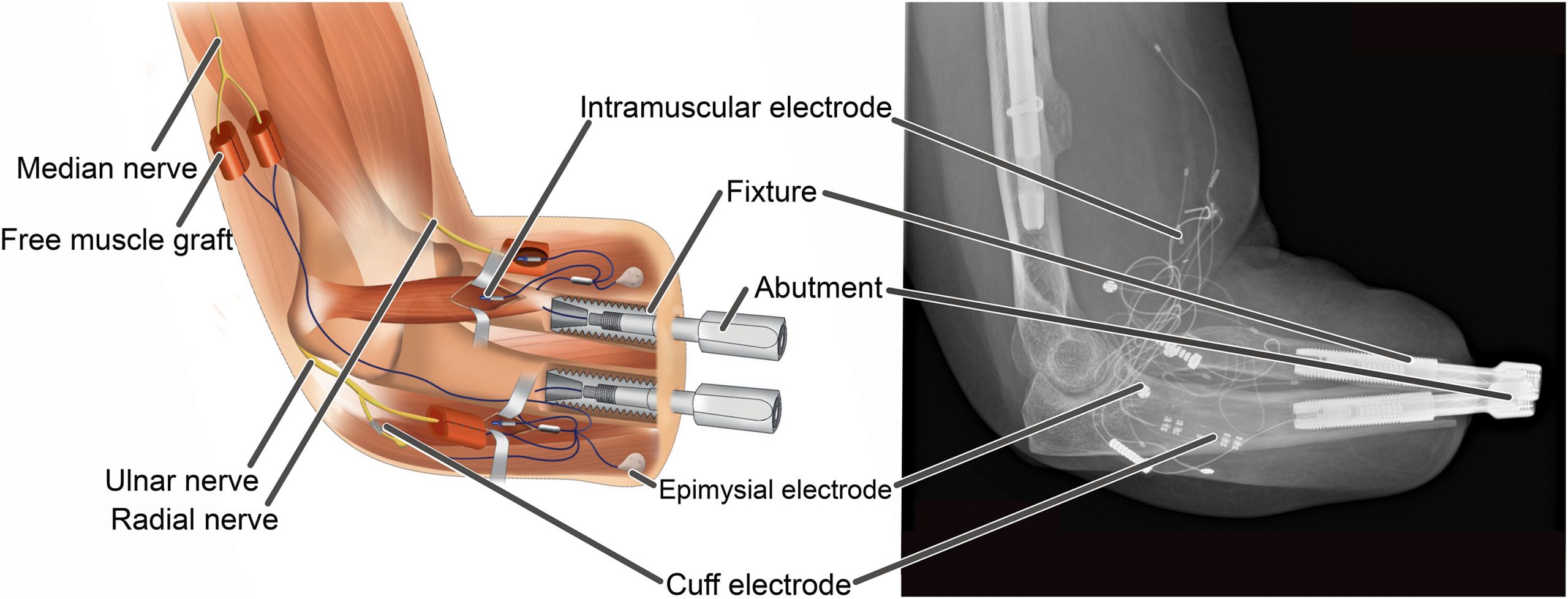
Схема и рентгеновский снимок полностью интегрированного человеко-машинного интерфейса у пациента. Источник.
Обучение с подкреплением в мягкой робототехнике
Обращая внимание на мягкую робототехнику, исследователи из Центра исследований и перспективных исследований Национального политехнического института Мексики и Автономного университета Коауилы предложили подход к использованию обучения с подкреплением (RL) для управления двигателем мягкого робота с пневматическим приводом, смоделированного на основе сплошной среды с различной плотностью. Этот метод включает в себя непрерывную схему «Актор-критик», предназначенную для отслеживания задач в мягком трехмерном роботе, подверженном липшицевым возмущениям. Их исследование представляет механизм временной разницы, основанный на вознаграждении, и прерывистый адаптивный подход к нейронным весам в критическом компоненте системы. Общая цель состоит в том, чтобы позволить RL управлять сложной, неопределенной и деформируемой природой мягких роботов, обеспечивая при этом стабильность управления в реальном времени, что является важнейшим требованием для физических систем. Это исследование сосредоточено на применении RL для решения уникальных задач, связанных с мягкими роботами.
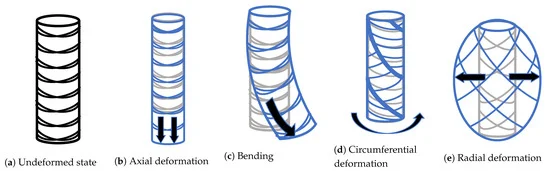
Отчетливые искажения гибкого робота цилиндрической формы. Источник.
Робот-гуманоид размером с подростка
Переходя к взаимодействию человека и робота, исследователи из Техасского университета в лаборатории человеко-ориентированной робототехники Остина представили робота-гуманоида размером с подростка по имени DRACO 3, разработанного в сотрудничестве с Apptronik. Этот робот, предназначенный для практического использования в среде обитания человека, имеет проксимальное срабатывание и использует механизмы подвижного контакта в нижней части тела, что позволяет принимать обширные вертикальные позы. Для управления сложными трансмиссиями DRACO 3 был разработан контроллер всего тела (WBC). Это исследование дает представление о разработке и управлении гуманоидами с подвижными контактными соединениями, уделяя особое внимание практичности и производительности.
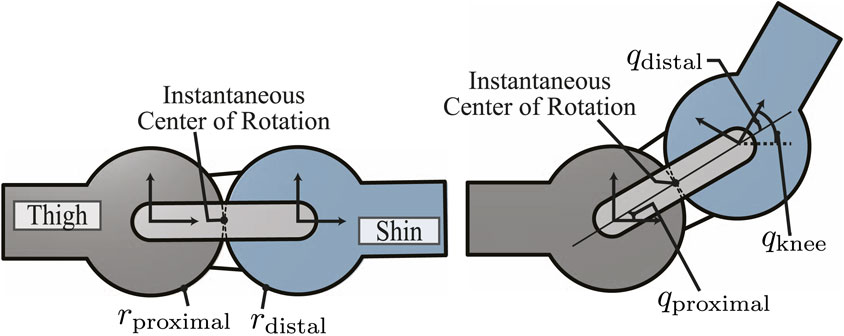
Схема, показывающая подвижный контактный сустав в колене. Исходная конфигурация (слева) и постугловое смещение (справа). Источник.
Влияние роботов на производительность
Переключив внимание на психологию, недавно исследователи из Технического университета Берлина исследовали феномен социальной лености в командах человек-робот. Социальная леность означает снижение индивидуальных усилий в команде по сравнению с работой в одиночку. В исследовании участвовали участники, проверявшие печатные платы на наличие дефектов: одна группа работала в одиночку, а другая — с партнером-роботом. Несмотря на надежный робот, который отмечал дефекты на досках, участники, работавшие с роботом, выявили меньше дефектов по сравнению с теми, кто работал в одиночку, что позволяет предположить потенциальное возникновение социального безделья в командах человек-робот. Это исследование проливает свет на проблемы, связанные с сотрудничеством человека и робота, и его влияние на индивидуальные усилия и производительность.
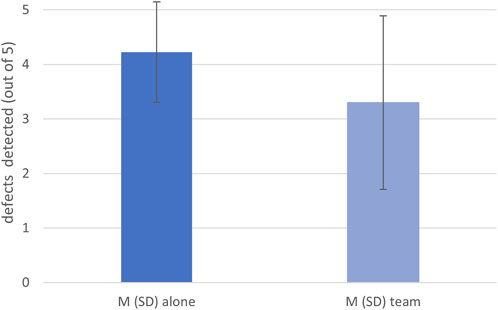
Результаты индивидуальной работы по сравнению с работой робота. Источник.
Робот, созданный искусственным интеллектом
Переключив наше внимание на проектирование роботов, исследователи из Северо-Западного университета разработали систему искусственного интеллекта, которая проектирует роботов с нуля, что позволяет создать шагающего робота за считанные секунды — задача, на разработку которой природе потребовались миллиарды лет. Эта система искусственного интеллекта работает на легком персональном компьютере, не полагаясь на энергоемкие суперкомпьютеры или большие наборы данных, что дает возможность быстро создавать роботов уникальных форм. Система работает путем повторения проекта, оценки его недостатков и уточнения структуры за считанные секунды. Это открывает путь к новой эре инструментов, созданных на основе ИИ, способных напрямую воздействовать на мир для различных приложений.
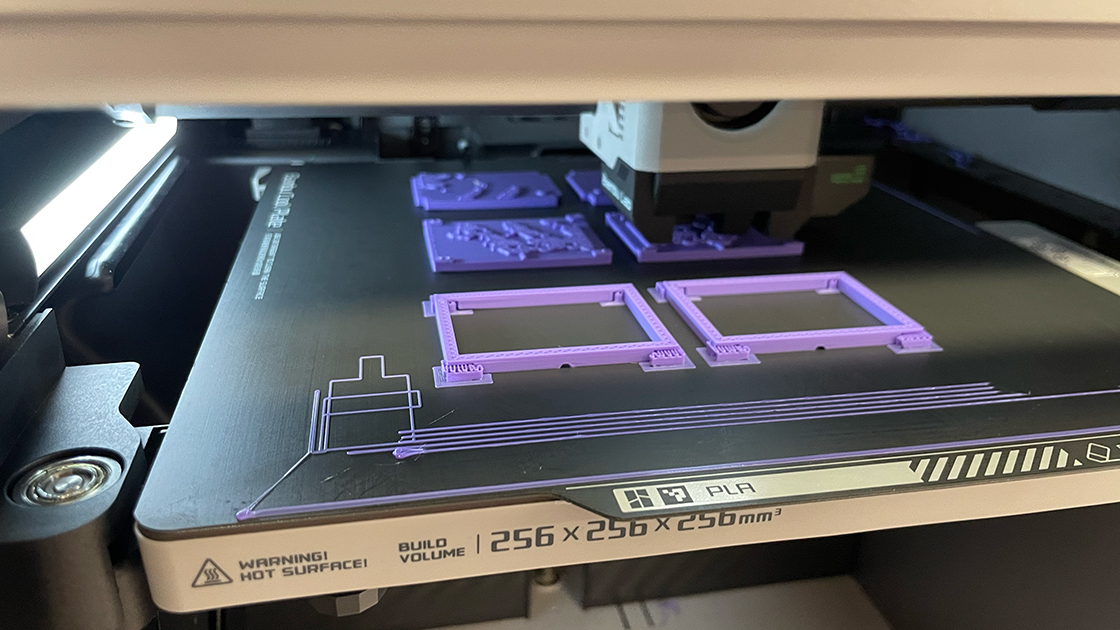
Робот, проектирующий 3D-принтер. Источник.
Настраиваемый робот для организации домашнего хозяйства
Наконец, в области домашней робототехники. исследователи из Стэнфорда, Принстона, Колумбийского университета и Google, разработали TidyBot, однорукого робота, предназначенного для уборки помещений в соответствии с личными предпочтениями. TidyBot использует большую языковую модель, обученную на данных Интернета, для идентификации различных объектов и понимания, где их разместить, что делает ее легко настраиваемой в соответствии с различными предпочтениями. В реальных тестах робот может правильно убрать примерно 85% предметов, что значительно улучшает организацию домашнего хозяйства. Хотя TidyBot еще есть куда совершенствоваться, исследователи полагают, что он имеет большие перспективы для того, чтобы сделать роботов более универсальными и полезными в домах и других средах.

Tidybot на тренировке. Источник.
Постоянное развитие во многих секторах подчеркивает гибкость и постоянно развивающийся характер робототехники, открывая новые возможности для ее внедрения в широкий спектр отраслей. Прогрессирующее расширение сферы робототехники отражает непоколебимую приверженность и дает представление о потенциальных последствиях этих достижений для будущих времен.
Источники:
- Хинрихс П., Зайберт К., Ариспе Гомес П., Пфингстхорн М. и Хейн А. (2023). Роботизированная система для фиксации пациента в боковом положении и снижения физической нагрузки медсестер. Робототехника, 12(5)
- Ортис-Каталан, М., Збинден, Дж., Милленаар, Дж., Д’Акколти, Д., Контроцци, М., Клементе, Ф., Каппелло, Л., Эрли, Э.Дж., Энцо Мастину, Юстина Коланковска, Муньос -Новоа М., Стью Йонссон, Ньел К., Паоло Сассу и Рикард Бронемарк. (2023). Высокоинтегрированная бионическая рука с нейронным контролем и обратной связью для использования в повседневной жизни. Научная робототехника
- Пантоха-Гарсия Л., Парра-Вега В., Гарсиа-Родригес Р. и Васкес-Гарсия CE (2023). Новый актер — критик обучения с подкреплением движений для мягких роботов непрерывной среды. Робототехника, 12(5)
- Банг С.Х., Гонсалес К., Ан Дж., Пейн Н. и Сентис Л. (26 сентября 2023 г.). Управление и оценка робота-гуманоида с подвижными контактными соединениями нижней части тела. Границы.
- Саймек Д.Х., Тракенбродт А. и Оннаш Л. (31 августа 2023 г.). Откинуться назад или наклониться? изучение социальной лености в командах человек-робот. Границы.
- Мгновенная эволюция: ИИ создает нового робота с нуля за считанные секунды. (без даты). Новости.northwestern.edu.
- Университет, С. (3 октября 2023 г.). Робот обеспечивает индивидуальную уборку комнаты. Стэнфордские новости.

Шонак Капур — член волонтерской команды Робохуба и скоро учится в старшей школе (Техас). Шон был очарован робототехникой с юных лет.
Шонак Капур — член волонтерской команды Робохуба и скоро учится в старшей школе (Техас). Шон был очарован робототехникой с юных лет.