
Источник: DALL·E 2 от OpenAI с подсказкой «гиперреалистичное изображение робота, читающего новости на ноутбуке в кафе»
Добро пожаловать в 4-й выпуск Robo-Insight, новостей о робототехнике, который выходит раз в две недели! В этом посте мы рады поделиться рядом новых достижений в этой области и осветить прогресс роботов в таких областях, как мобильные приложения, уборка, подводная добыча полезных ископаемых, гибкость, благополучие человека, лечение депрессии и взаимодействие с людьми.
Упрощенная адаптация поведения мобильных роботов
В мире системных адаптаций исследователи из Технологического университета Эйндховена представили методологию, которая устраняет разрыв между разработчиками приложений и инженерами по управлению в контексте адаптации поведения мобильных роботов. Этот подход использует символические описания поведения роботов, известные как «семантика поведения», и переводит их в управляющие действия посредством «семантической карты». Это нововведение направлено на упрощение программирования управления движением для приложений автономных мобильных роботов и облегчение интеграции с управляющим программным обеспечением различных поставщиков. Создавая структурированный уровень взаимодействия между уровнями приложений, взаимодействия и управления, эта методология может упростить сложность приложений мобильных роботов, что потенциально приведет к созданию более эффективных систем подземной разведки и навигации.
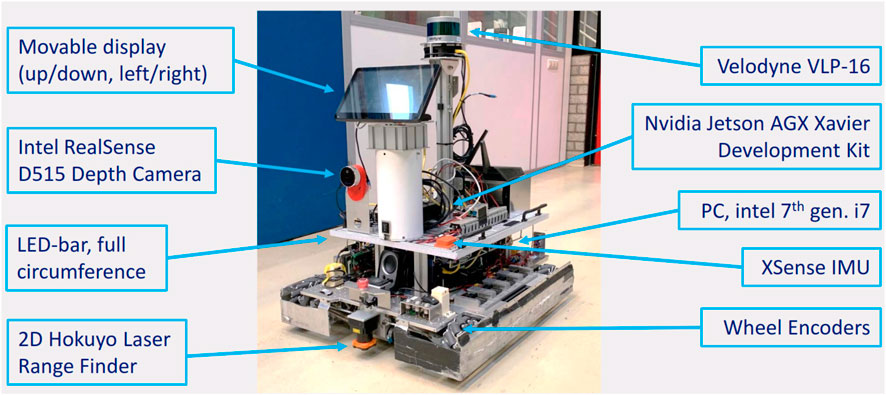
Фронтальная перспектива мобильной платформы (аппаратные компоненты показаны синими стрелками). Источник.
Новый робот для уборки дома
Говоря о полезных роботах, Университет Принстон создала робота под названием TidyBot для решения задач по уборке дома. В отличие от простых задач, таких как перемещение объектов, реальная уборка требует, чтобы робот различал объекты, правильно размещал их и не повреждал. TidyBot достигает этого благодаря сочетанию физической ловкости, визуального распознавания и понимания языка. Оснащенный мобильной роботизированной рукой, моделью зрения и языковой моделью, TidyBot может идентифицировать объекты, размещать их в определенных местах и даже делать выводы о правильных действиях с точностью 85%. Успех TidyBot демонстрирует его потенциал для решения сложных домашних задач.
TidyBot в работе. Источник.
Роботы для глубоководной добычи полезных ископаемых
Смещая наше внимание на подводную среду, исследователи решают проблемы эффективности, с которыми сталкиваются при глубоководной добыче полезных ископаемых, посредством инновационного планирования маршрута для автономных роботизированных горнодобывающих машин. Поскольку глубоководные марганцевые конкреции обладают значительным потенциалом, эти роботизированные транспортные средства необходимы для их сбора. Совершенствуя методы планирования пути, исследователи стремятся повысить эффективность этих транспортных средств при пересечении сложной подводной местности, избегая при этом препятствий. Такое развитие событий может привести к более эффективной и ответственной добыче ресурсов со дна океана, способствуя устойчивому использованию ценных минеральных ресурсов.
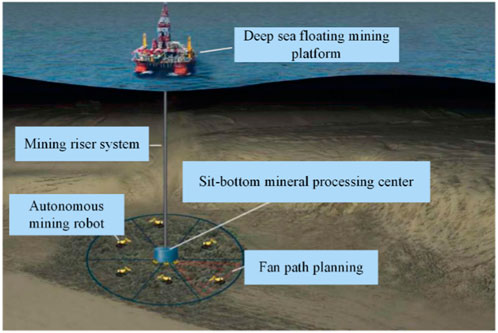
Схема, изображающая операционную структуру системы глубоководной добычи полезных ископаемых. Источник.
Усовершенствованные мягкие роботы, обладающие ловкостью и гибкостью
Что касается области роботизированного движения, в последнее время исследователи из Шанхайского университета Цзяо Тонг разработали небольших мягких роботов, обладающих поразительной ловкостью, позволяющих немедленно и обратимо изменять направление движения и реконфигурацию формы. Эти роботы, оснащенные искусственными мышцами из активного диэлектрического эластомера и уникальной конструкцией стопы с хиральной решеткой, могут менять направление во время быстрого движения с помощью одного входного напряжения. Стопа с хиральной решеткой генерирует различные модели передвижения, включая движение вперед, назад и круговое движение, путем регулирования частоты напряжения. Кроме того, сочетание этой структурной конструкции с материалами с памятью формы позволяет роботам выполнять сложные задачи, такие как навигация по узким туннелям или формирование определенных траекторий. Эта инновация открывает двери для автономных мягких роботов следующего поколения, способных к универсальному передвижению.
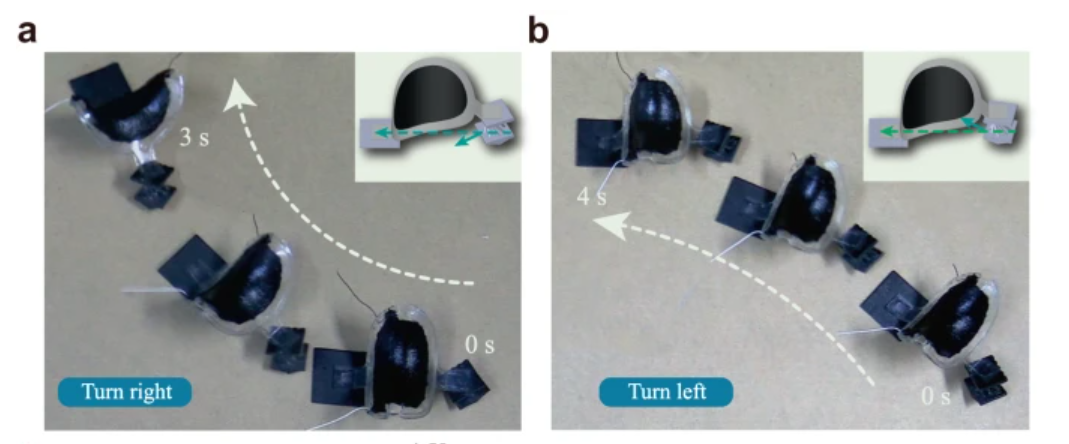
Мягкий робот совершает круговое движение в правом или левом направлении, располагая решетчатую ножку по направлению к соответствующим сторонам. Источник.
Роботизированных собак используют для утешения пациентов
Обращая наше внимание на использование роботов в сфере здравоохранения, Студенты СтэнфордаВместе с исследователями и врачами в партнерстве с лидерами индустрии искусственного интеллекта и робототехники они продемонстрировали новых роботов-собак, предназначенных для взаимодействия с педиатрическими пациентами в детской больнице Люсиль Паккард. Пациенты в больнице имели возможность пообщаться с игривыми роботами, продемонстрировав потенциальную пользу этих механических питомцев для благополучия детей во время их пребывания в больнице. Роботы под названием Pupper были разработаны студентами-инженерами и управлялись с помощью портативных контроллеров. Целью демонстрации было изучение взаимодействия между роботами и педиатрическими пациентами, изучение способов улучшения клинического опыта и снижения беспокойства.

Пациент играет с собакой-роботом. Источник.
Роботизированные инновации могут помочь при депрессии
Помимо улучшения самочувствия, недавнее пилотное исследование изучило потенциальные преимущества использования робототехники в транскраниальной магнитной стимуляции (ТМС) для лечения депрессии. Исследователи под руководством Хёнсу Шина разработали специального робота для ТМС, предназначенного для повышения точности размещения катушки ТМС на мозге, что является важным аспектом эффективного лечения. Используя роботизированную систему, они сократили время подготовки на 53% и значительно свели к минимуму ошибки при позиционировании катушек. Исследование выявило сопоставимые терапевтические эффекты на тяжесть депрессии и региональный мозговой кровоток (rCBF) между роботизированными и мануальными методами ТМС, проливая свет на потенциал роботизированной помощи в повышении точности и эффективности лечения ТМС.
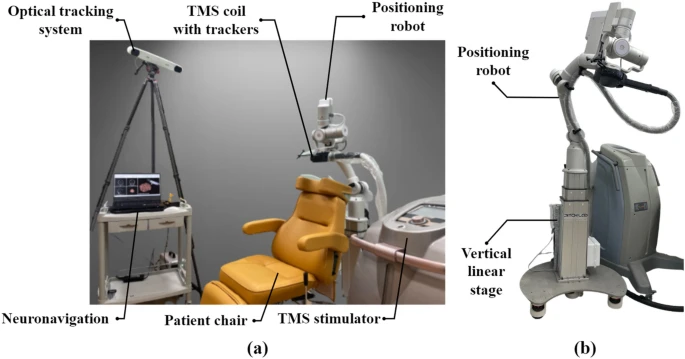
Конфигурация роботизированной повторяющейся транскраниальной магнитной стимуляции (рТМС) в лечебном учреждении и роботизированного устройства позиционирования для автоматического размещения катушек. Источник.
Передовые исследования роботизированного глаза
Наконец, в мире совершенствования человека и робота исследование, проведенное исследователи из различных учреждений исследовал потенциал использования глаз роботов в качестве прогностических сигналов при взаимодействии человека и робота (HRI). Исследование было направлено на то, чтобы понять, может ли конструкция прогнозирующих глаз роботов улучшить взаимодействие между людьми и роботами и если да, то каким образом. Были протестированы четыре различных типа глаз, включая стрелки, человеческие глаза и два антропоморфных глаза робота. Результаты показали, что абстрактные антропоморфные глаза робота, имитирующие определенные аспекты человеческого внимания, были наиболее эффективными для направления внимания участников и запуска рефлекторных сдвигов. Эти результаты показывают, что включение абстрактных антропоморфных глаз в конструкцию роботов может улучшить предсказуемость движений роботов и улучшить HRI.
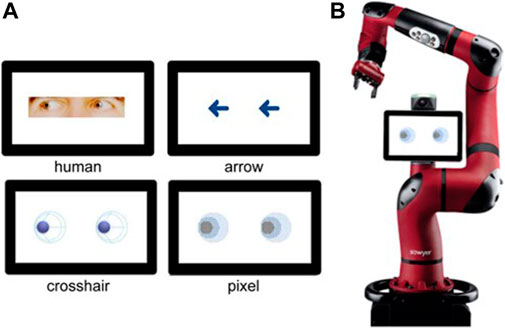
Четыре типа стимулов. В первом ряду показаны стимулы человека (слева) и стрелы (справа). Во втором ряду изображены абстрактные антропоморфные глаза робота. Фотография субъекта анкеты, кооперативного робота Сойера. Источник.
Непрерывный поток прогресса, наблюдаемый в различных областях, подчеркивает адаптируемый и постоянно развивающийся характер робототехники, открывая новые пути ее внедрения в широком спектре отраслей. Постепенное развитие в области робототехники отражает настойчивые усилия и намекает на потенциальные последствия, которые эти успехи могут иметь для будущего.
Источники:
- Чен, Х.Л., Хендрикс, Б., Торта, Э., Брюнинкс, Х., и ван де Моленграфт, Р. (10 июля 2023 г.). Адаптация поведения мобильных роботов с помощью составов семантических карт контроллеров на основе ограничений. Границы.
- Princeton Engineering – инженеры убираются с помощью TidyBot. (без даты). Принстон Инжиниринг. Проверено 30 августа 2023 г.,
- Се Ю., Лю К., Чен X., Лю Г., Ленг Д., Пан В. и Шао С. (12 июля 2023 г.). Исследование по планированию маршрута автономной машины для добычи марганцевых конкреций на основе подъемной системы добычи. Границы.
- Ван Д., Чжао Б., Ли Х., Донг Л., Чжан М., Цзоу Дж. и Гу Г. (2023). Ловкие мягкие роботы с электрическим приводом и реконфигурируемой конструкцией ног с хиральной решеткой. Природные коммуникации, 14(1), 5067.
- Университет, С. (1 августа 2023 г.). Роботы-собаки вызывают радость в Стэнфордской больнице. Стэнфордский отчет.
- Шин Х., Чон Х., Рю В., Ли Г., Ли Дж., Ким Д., Сон И.-Ю., Чунг Ю.-А. и Ли С. (2023). Роботизированная транскраниальная магнитная стимуляция в лечении депрессии: пилотное исследование. Научные отчеты, 13(1), 14074.
- Оннаш Л., Швайдлер П. и Шмидт Х. (3 июля 2023 г.). Потенциал глаз робота как прогностического сигнала в HRI — исследовании слежения за взглядом. Границы.

Шонак Капур — член волонтерской команды Робохуба и скоро учится в старшей школе (Техас). Шон был очарован робототехникой с юных лет.
Шонак Капур — член волонтерской команды Робохуба и скоро учится в старшей школе (Техас). Шон был очарован робототехникой с юных лет.