
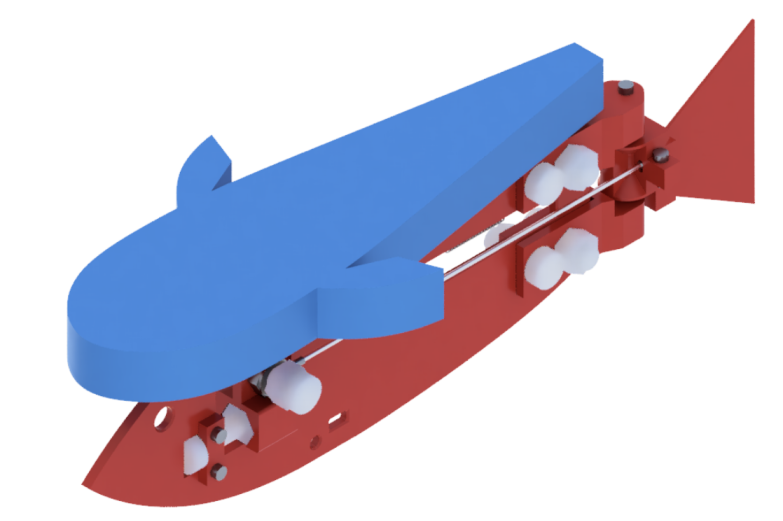
Рыба-робот. Изображение предоставлено: Цам Лунг Ю
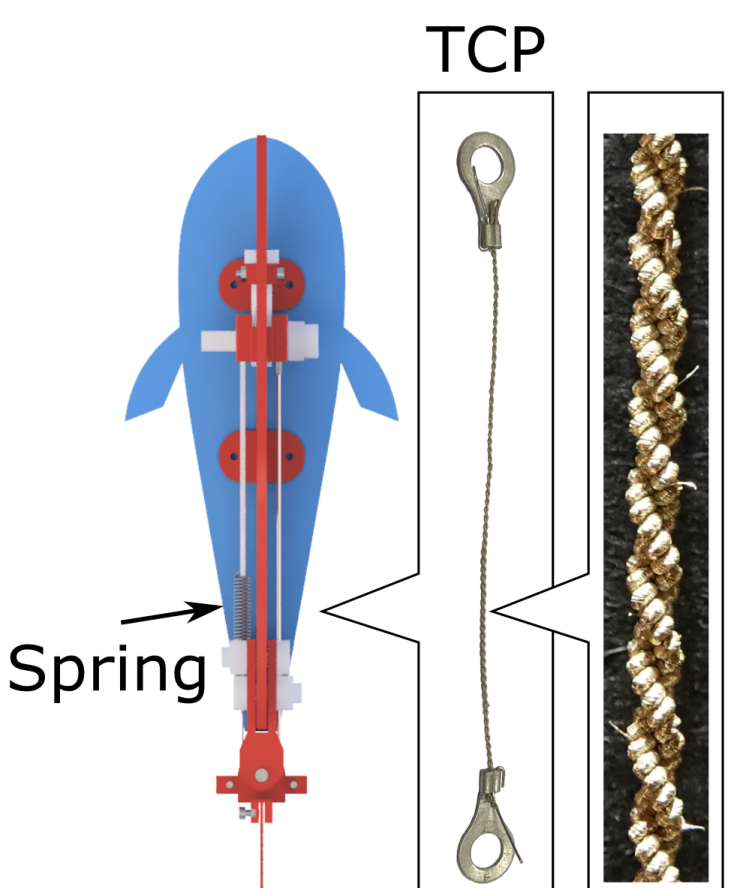
Рыба-робот была оснащена скрученным и спиральным полимером (TCP), чтобы двигаться вперед, легким и недорогим устройством, которое использует изменение температуры для создания движения, что также ограничивает ее скорость.
TCP работает, сокращаясь подобно мышцам при нагревании, преобразовывая энергию в механическое движение. Используемый в данной работе ТКП нагревается за счет джоулева нагревания – прохождение тока через электрический проводник производит тепловую энергию и нагревает проводник. Минимизируя расстояние между TCP с одной стороны робота-рыбы и пружиной с другой, это активирует задний плавник, позволяя роботу-рыбе развивать новые скорости. Волнообразные взмахи его заднего плавника измерялись с частотой 2 Гц, две волны в секунду. Частота электрического тока такая же, как и частота взмаха хвоста.
Выводы, опубликованные на 6-й Международной конференции IEEE-RAS по мягкой робототехнике (RoboSoft 2023), открывают новый путь к повышению срабатывания — действия, заставляющего машину или устройство работать — частоты TCP за счет термомеханической конструкции, и показывают возможность использования TCP с высокой частотой в водной среде.
Ведущий автор Цам Лунг Ю из Бристоля Кафедра инженерной математики сказал: «Привод из витого и спирального полимера (TCP) является многообещающим новым приводом, демонстрирующим привлекательные свойства легкого веса, низкой стоимости, высокой плотности энергии и простого процесса изготовления.
«Они могут быть изготовлены из очень легко поддающихся оценке материалов, таких как леска, и они сжимаются и обеспечивают линейное срабатывание при нагревании. Однако из-за времени, необходимого для рассеивания тепла во время фазы релаксации, это делает их медленными».
Путем оптимизации структурной конструкции пары мышц-антагонистов TCP-пружины и сближения их точек крепления, это позволило заднему плавнику поворачиваться под большим углом при той же величине срабатывания TCP.
Антагонистические мышцы. Изображение предоставлено: Цам Лунг Ю
Хотя для этого требуется большая сила, TCP является мощным приводом с высокой плотностью рабочей энергии, и он все еще способен управлять плавником.
До сих пор TCP в основном использовались для таких приложений, как носимые устройства и роботизированные руки. Эта работа открывает больше областей применения, где можно использовать TCP, например, морские роботы для подводного исследования и мониторинга.
Цам Лунг Ю добавил: «Наша роботизированная рыба плавала с самой высокой частотой срабатывания, которую можно найти в реальном приложении TCP, а также с самой высокой скоростью передвижения приложения TCP на данный момент.
«Это действительно интересно, так как открывает больше возможностей для применения TCP в различных областях».
Теперь команда планирует расширить масштабы и разработать робота с лентовидным плавником, вдохновленного рыбой-ножом, который может ловко плавать в воде.

Университет Бристоля – один из самых популярных и успешных университетов Великобритании.