
Ученые из Института интеллектуальных систем Макса Планка в Штутгарте разработали мягкий роботизированный инструмент, который обещает однажды изменить минимально инвазивную эндоваскулярную хирургию. Магнитный инструмент, состоящий из двух частей, может помочь визуализировать в режиме реального времени мелкие морфологические детали частичных сосудистых закупорок, таких как стенозы, даже в самых узких и изогнутых сосудах. Он также может пробиться через серьезные закупорки, такие как хроническая полная окклюзия. Этот инструмент однажды сможет продвинуть восприятие эндоваскулярных медицинских устройств на шаг дальше.
Методы внутрисосудистой визуализации и микрокатетерные процедуры становятся все более совершенными, производя революцию в диагностике и лечении многих заболеваний. Однако современные методы часто не могут точно обнаружить мелкие особенности сосудистых заболеваний, например, те, которые видны изнутри окклюзированных сосудов, из-за таких ограничений, как неравномерная диффузия контрастного вещества и трудности безопасного доступа к окклюзированным сосудам. Такие ограничения могут задержать быстрое вмешательство и лечение пациента.
Ученые из Института интеллектуальных систем Макса Планка в Штутгарте рассмотрели эту проблему. Они использовали концепции мягкой робототехники и микропроизводства для разработки миниатюрного магнитно-мягкого инструмента, который выглядит как очень тонкий угорь. Однажды этот инструмент может расширить возможности восприятия эндоваскулярных устройств еще на один шаг вперед. В статье и видео команда показывает, как инструмент, продвигаемый вперед потоком крови, проходит через самые узкие искусственные сосуды – независимо от того, есть ли резкий изгиб, кривая или препятствие.
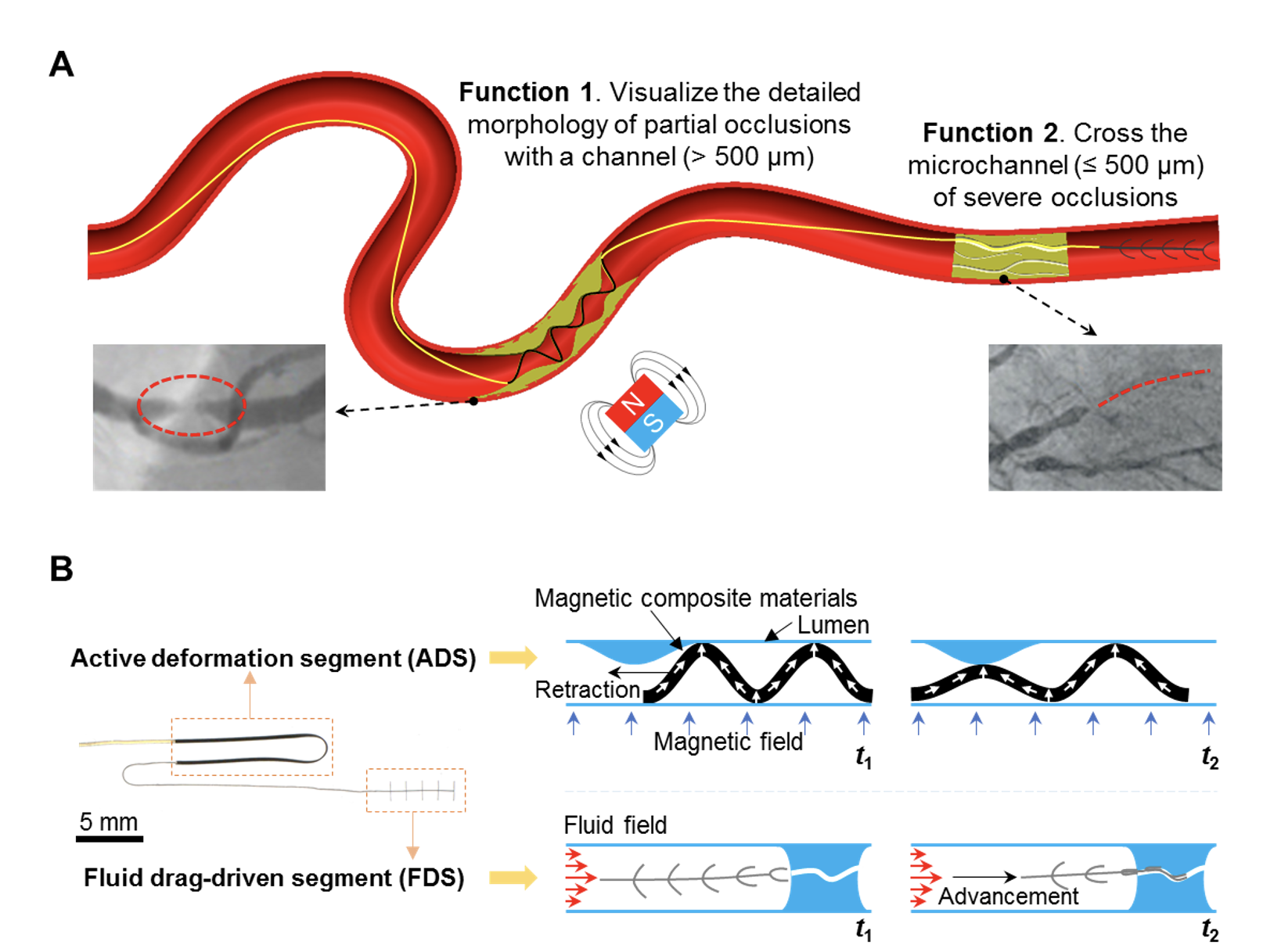
Когда инструмент достигает окклюзии, например частично заблокированной артерии, он совершает волнообразную деформацию под действием внешнего магнитного поля (подробнее об этом ниже). Тогда деформированное мягкое тело будет мягко контактировать с окружающими окклюзированными структурами. Наконец, формы устройства в реальном времени, когда мы его втягиваем, «визуализируют» морфологические детали внутри сосуда, что облегчает высвобождение лекарства при окклюзии, а также определение размера и размещение медицинских устройств, таких как стенты и баллоны, для последующего лечения. .
При серьезной окклюзии с крошечными микроканалами, по которым течет кровь, инструмент может использовать силу крови, чтобы легко скользить по этим узким каналам. Выбор пути указывает хирургу, какой путь доступа выбрать для следующей медицинской операции.
«Методы диагностики и лечения узких эндоваскулярных заболеваний, таких как стеноз сосудов или хроническая тотальная окклюзия, все еще очень ограничены. Трудно точно обнаружить и пересечь эти области в очень сложной сети сосудов внутри тела», — говорит Инбо Ян, приглашенный исследователь в отделе физического интеллекта MPI-IS. Он является первым автором статьи «Мягкие милли-инструменты с магнитным усилением для обнаружения морфологии закупоренного просвета», который был опубликован в Достижения науки 18 августа 2023 г. «Мы надеемся, что наш новый мягкий роботизированный инструмент однажды поможет точно обнаруживать и перемещаться по множеству сложных и узких сосудов внутри тела, а также проводить лечение более эффективно, снижая потенциальные риски».
Этот крошечный и мягкий инструмент имеет магнитный сегмент активной деформации (ADS) длиной 20 мм и сегмент с приводом от гидравлического сопротивления (FDS) длиной 5 мм. Профиль намагничивания ADS предварительно программируется с помощью вибрирующего магнитометра, обеспечивая однородное магнитное поле. Под действием внешнего магнитного поля эта деталь может деформироваться, принимая синусоидальную форму, легко адаптируясь к окружающей среде и деформируясь в различные формы. Таким образом, непрерывный мониторинг изменений формы АДС при его втягивании может предоставить подробную морфологическую информацию о частичных окклюзиях внутри сосуда.
FDS был изготовлен из мягкого полимера. Небольшие балки на его стороне изгибаются под действием гидравлического сопротивления набегающего потока. Таким образом, весь инструмент перемещается к области с наибольшей скоростью потока. Таким образом, изучение местоположения FDS при его продвижении может указать на расположение и маршрут микроканала внутри серьезных окклюзий.
«Обнаружение сосудистых заболеваний в дистальных и труднодоступных сосудистых областях, таких как мозг, может быть более сложной клинически, и наш инструмент может работать со Stentbot в автономном режиме», — говорит Тяньлу Ван, постдок в отделе физического интеллекта. в МПИ-ИС и еще один первый автор работы. «Stentbot — это беспроводной робот, используемый для передвижения и выполнения медицинских функций в дистальной сосудистой сети, которую мы недавно разработали в нашей исследовательской группе. Мы считаем, что этот новый программный роботизированный инструмент может добавить новые возможности беспроводным роботам и предложить новые решения в этих сложных регионах».
«Наш инструмент демонстрирует потенциал для значительного улучшения малоинвазивной медицины. Эта технология может достигать и обнаруживать области, доступ к которым ранее был затруднен. Мы ожидаем, что наш робот поможет сделать диагностику и лечение, например, стеноза или ХТО более точным и своевременным», — говорит Метин Ситти, директор департамента физического интеллекта MPI-IS, профессор Университета Коч и ETH Zurich.

Целью Института интеллектуальных систем Макса Планка является исследование и понимание принципов организации интеллектуальных систем и лежащего в их основе цикла восприятия-действия-обучения.