
Картина из бумаги»Универсальное многоконтактное планирование и контроль движений ног.«. © Американская ассоциация содействия развитию науки
Нам представилась возможность взять интервью у Жана Пьера Слеймана, автора статьи «Универсальное многоконтактное планирование и контроль при локоманипуляции на ногах», недавно опубликованной в журнале Научная робототехника.
Какова тема исследования в вашей статье?
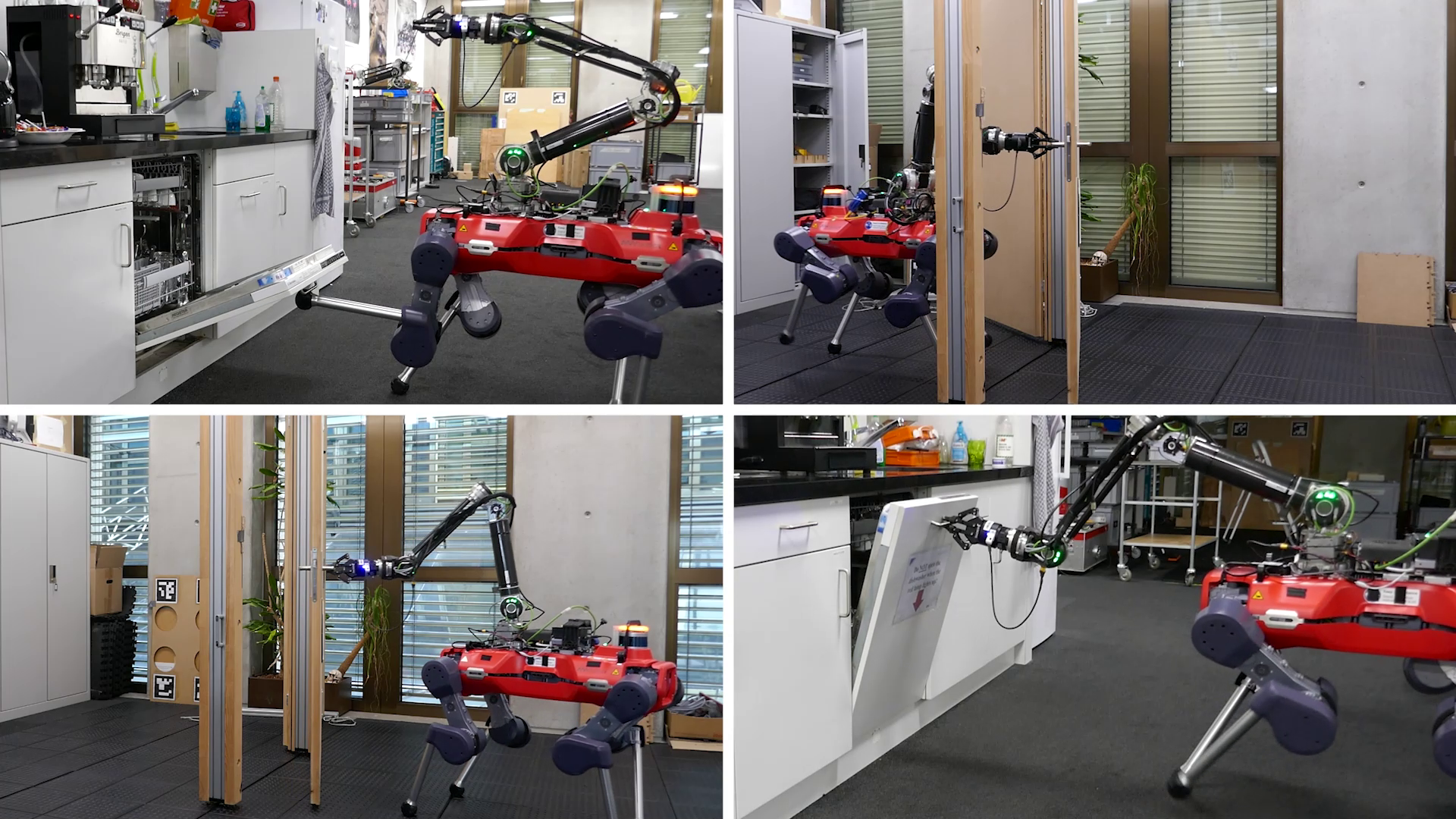
Тема исследования сосредоточена на разработке архитектуры планирования и управления на основе модели, которая позволяет мобильным манипуляторам на ногах решать разнообразные проблемы локоманипуляции (т. е. проблемы манипуляции, по своей сути связанные с элементом передвижения). Наше исследование специально нацелено на задачи, для решения которых потребуется множественное контактное взаимодействие, а не на приложения, связанные с выбором и размещением. Чтобы гарантировать, что наш подход не ограничивается средами моделирования, мы применили его для решения реальных задач с помощью системы на ногах, состоящей из четвероногой платформы ANYmal, оснащенной DynaArm, специально созданной роботизированной рукой с 6 степенями свободы.
Не могли бы вы рассказать нам о последствиях вашего исследования и о том, почему это интересная область для изучения?
Исследования были вызваны желанием создать таких роботов, а именно мобильные манипуляторы на ногах, способные решать различные реальные задачи, такие как перемещение дверей, открытие/закрытие посудомоечных машин, управление клапанами в промышленных условиях и т. д. Стандартный подход заключался бы в том, чтобы решать каждую задачу индивидуально и независимо, направляя значительный объем инженерных усилий на создание желаемого поведения вручную:
Обычно это достигается за счет использования жестко запрограммированных конечных автоматов, в которых проектировщик определяет последовательность промежуточных целей (например, схватить дверную ручку, открыть дверь на желаемый угол, удерживать дверь одной из ног, переместить руку на другую сторону двери, пройти через дверь, закрывая ее и т. д.). В качестве альтернативы человек-эксперт может продемонстрировать, как решить задачу, управляя роботом дистанционно, записывая его движение и обучая робота имитировать записанное поведение.
Однако этот процесс очень медленный, утомительный и подвержен ошибкам инженерного проектирования. Чтобы избежать этого бремени для каждой новой задачи, в исследовании был выбран более структурированный подход в виде единого планировщика, который может автоматически обнаруживать необходимое поведение для широкого спектра задач локоманипуляции, не требуя какого-либо подробного руководства для любой из них. .
Не могли бы вы объяснить вашу методологию?
Ключевая идея, лежащая в основе нашей методологии, заключалась в том, что все задачи локоманипулирования, которые мы стремились решить, можно смоделировать как задачи планирования задач и движений (TAMP). TAMP — это хорошо зарекомендовавшая себя структура, которая в основном использовалась для решения задач последовательного манипулирования, когда робот уже обладает набором примитивных навыков (например, брать объект, размещать объект, перемещаться к объекту, бросать объект и т. д.), но все еще имеет правильно интегрировать их для решения более сложных долгосрочных задач.
Эта перспектива позволила нам разработать единую формулировку двухуровневой оптимизации, которая может охватить все наши задачи и использовать знания, специфичные для предметной области, а не знания, специфичные для конкретной задачи. Объединив это с хорошо зарекомендовавшими себя сильными сторонами различных методов планирования (оптимизация траектории, поиск по информированному графу и планирование на основе выборки), мы смогли достичь эффективной стратегии поиска, которая решает проблему оптимизации.
Основная техническая новизна в нашей работе заключается в Модуль автономного многоконтактного планированияизображенный в Модуль Б из Рисунок 1 в газете. Его общую настройку можно резюмировать следующим образом: начиная с определяемого пользователем набора конечных рабочих органов робота (например, передняя левая нога, передняя правая нога, захват и т. д.) и возможностей объектов (они описывают, где робот может взаимодействовать с объекта) вводится дискретное состояние, фиксирующее совокупность всех контактных пар. Учитывая начальное и конечное состояние (например, робот должен оказаться за дверью), многоконтактный планировщик затем решает задачу одного запроса, постепенно выращивая дерево посредством двухуровневого поиска по возможным режимам контакта совместно с непрерывным роботом. -траектории объекта. Полученный план дополняется единой оптимизацией траектории с большим горизонтом по обнаруженной последовательности контактов.
Каковы были ваши основные выводы?
Мы обнаружили, что наша система планирования способна быстро обнаруживать сложные многоконтактные планы для различных задач локомотивирования, несмотря на минимальное руководство. Например, для сценария обхода двери мы указываем возможности двери (т. е. ручку, заднюю поверхность и переднюю поверхность) и лишь обеспечиваем редкую цель, просто прося робота оказаться за дверью. Кроме того, мы обнаружили, что сгенерированное поведение физически согласовано и может быть надежно реализовано с помощью мобильного манипулятора с настоящими ногами.
Какую дальнейшую работу вы планируете в этом направлении?
Мы рассматриваем представленную структуру как ступеньку на пути к разработке полностью автономного конвейера локоманипуляций. Однако мы видим некоторые ограничения, которые мы стремимся устранить в будущей работе. Эти ограничения в первую очередь связаны с этапом выполнения задачи, где отслеживание поведения, сгенерированного на основе заранее смоделированных сред, возможно только при условии достаточно точного описания, которое не всегда легко определить.
Устойчивость к моделированию несоответствий можно значительно повысить, дополнив наш планировщик методами, основанными на данных, такими как глубокое обучение с подкреплением (DRL). Таким образом, одним из интересных направлений будущей работы могло бы стать руководство обучением надежной политике DRL с использованием надежных экспертных демонстраций, которые могут быть быстро созданы нашим планировщиком локомотивных манипуляций для решения ряда сложных задач с минимальным инженерным вознаграждением.
Об авторе

|
Жан-Пьер Сулейман получил степень бакалавра наук в области машиностроения в Американском университете Бейрута (АУБ), Ливан, в 2016 году, а также степень магистра в области автоматизации и управления в Миланском политехническом университете, Италия, в 2018 году. В настоящее время он является доктором философии. Д. кандидат в Лабораторию робототехнических систем (RSL), ETH Zurich, Швейцария. Его текущие исследовательские интересы включают основанное на оптимизации планирование и контроль мобильных манипуляций с ногами. |

Дэниел Каррильо-Сапата получил степень доктора философии в области роевой робототехники в Бристольской лаборатории робототехники в 2020 году. Теперь он поощряет культуру «научной агитации», позволяющей вести двусторонний диалог между исследователями и обществом.
Дэниел Каррильо-Сапата получил степень доктора философии в области роевой робототехники в Бристольской лаборатории робототехники в 2020 году. Теперь он поощряет культуру «научной агитации», чтобы участвовать в двустороннем диалоге между исследователями и обществом.