
Источник: DALL·E 2 от OpenAI с подсказкой «гиперреалистичное изображение робота, читающего новости на ноутбуке в кофейне»
Добро пожаловать в третий выпуск Robo-Insight, выпуска новостей о робототехнике, который выходит раз в две недели! В этом посте мы рады поделиться рядом новых достижений в этой области и рассказать о прогрессе в таких областях, как движение, незнакомая навигация, динамическое управление, копание, сельское хозяйство, хирургия и сортировка продуктов питания.
Биологически вдохновленный робот осваивает 8 режимов движения для адаптивного маневрирования
В мире постоянного движения недавно разработанный робот по имени M4 (Multi-Modal Mobility Morphobot) продемонстрировал способность переключаться между восемью различными режимами движения, включая перекатывание, полет и ходьбу. Разработано исследователи из Центра автономных систем и технологий Калифорнийского технологического института (CAST) и Северо-восточного университета, робот может автономно адаптировать свою стратегию движения в зависимости от окружающей среды. Проект M4, созданный инженерами Мори Гарибом и Алирезой Рамезани, направлен на улучшение передвижения роботов за счет использования комбинации адаптируемых компонентов и искусственного интеллекта. Потенциальные области применения этой инновации варьируются от медицинского транспорта до исследования планет.

Робот переключается с вождения на ходьбу. Источник.
Новый подход к навигации для роботов, помогающий слабовидящим людям
Говоря о движении, исследователи из Гамбургского университета прикладных наук представили инновационный навигационный алгоритм для системы помощи мобильным роботам на основе данных OpenStreetMap. Алгоритм решает проблемы, с которыми сталкиваются люди с нарушениями зрения при навигации по незнакомым маршрутам. Используя трехэтапный процесс, включающий проверку карты, дополнение и создание навигационного графа, алгоритм оптимизирует навигацию для этой группы пользователей. В исследовании подчеркивается потенциал данных OpenStreetMap для улучшения навигационных приложений для людей с нарушениями зрения, что имеет значение для продвижения робототехнических решений, которые могут удовлетворить конкретные требования пользователей посредством проверки и дополнения данных.

Этот автономный автомобиль предназначен для помощи людям с нарушениями зрения. Источник.
Уникальная технология улучшает управление роботом в динамичных средах.
В том же духе, что и новые среды, исследователи из Массачусетского технологического института и Стэнфордского университета разработали новую технику машинного обучения, которая улучшает управление роботами, такими как дроны и автономные транспортные средства, в быстро меняющихся условиях. Этот подход использует идеи из теории управления для создания эффективных стратегий управления сложной динамикой, например, воздействием ветра на летательные аппараты. Этот метод имеет потенциал для целого ряда приложений, от адаптации автономных транспортных средств к скользким дорожным условиям до повышения производительности дронов в сложных ветровых условиях. Интегрируя изученную динамику и структуры, ориентированные на управление, подход исследователей предлагает более эффективный и действенный метод управления роботами с последствиями для различных типов динамических систем в робототехнике.

Робот, который мог бы улучшить управление в разных средах. Источник.
Роющие роботы с ногами-оригами
Роботы какое-то время совершенствовались в надземных областях, но теперь они также продвигаются в подземных пространствах. исследователи из Калифорнийского университета в Беркли и Калифорнийского университета в Санта-Круз представили новый подход к робототехнике, в котором используются складные ножки, вдохновленные оригами, для перемещения по гранулированным средам. Черпая вдохновение из биологических систем и их анизотропных сил, этот подход использует методы возвратно-поступательного закапывания для точного направленного движения. Используя простые линейные приводы и используя пассивные анизотропные силовые реакции, это исследование прокладывает путь к упрощенной роботизированной копке, проливая свет на перспективу упрощенной, но эффективной подземной разведки и навигации. Эта инновационная интеграция принципов оригами в робототехнику открывает двери для усовершенствованных подземных приложений.
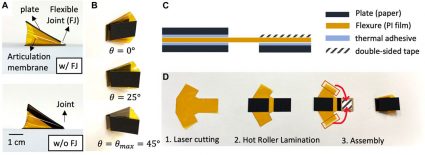
Прототип стопы и способ ее изготовления. Источник.
Инновационные процессы в сельскохозяйственной робототехнике
В мире сельского хозяйства исследователь из Университета Карнеги-Меллона недавно исследовал синергию между научным фенотипированием и сельскохозяйственной робототехникой в своей магистерской диссертации. Их исследование углубилось в жизненно важную роль точного измерения характеристик растений в разработке улучшенных сортов растений, а также выдвинуло на первый план многообещающую область роботизированных манипуляций с растениями в сельском хозяйстве. Предвидя передовые методы ведения сельского хозяйства, исследователь делает упор на таких задачах, как обрезка, опыление и сбор урожая, выполняемых роботами. Предлагая инновационные методы, такие как трехмерная облачная оценка для подсчета семян и сегментации виноградной лозы, исследование направлено на оптимизацию сбора данных для сельскохозяйственной робототехники. Кроме того, создание и использование 3D-моделей скелета виноградной лозы демонстрирует потенциал для оптимизации качества и урожайности винограда, прокладывая путь к более эффективным методам ведения сельского хозяйства.
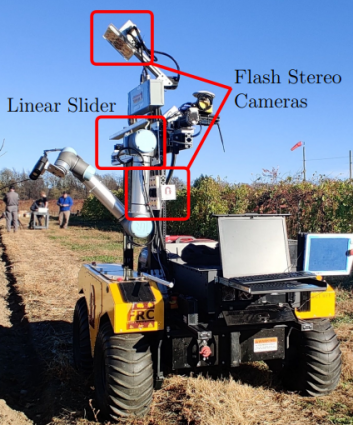
Представлена роботизированная платформа сбора данных. Источник.
Мягкие роботизированные катетеры могут помочь улучшить минимально инвазивную хирургию
Переключив наше внимание на хирургию, команда инженеры-механики и медицинские исследователи из Университета Мэриленда, Университета Джона Хопкинса и Медицинской школы Университета Мэриленда. разработала систему мягкого роботизированного катетера с пневматическим приводом для улучшения контроля во время минимально инвазивных операций. Система позволяет хирургам одновременно с высокой точностью вводить и изгибать кончик катетера, потенциально улучшая результаты процедур, требующих навигации в узких и сложных пространствах тела. Подход исследователей упрощает механическую архитектуру и архитектуру управления за счет пневматического привода, обеспечивая интуитивно понятное управление как сгибанием, так и вставкой без ручного повышения давления в канале. Система показала себя многообещающей в точном достижении цилиндрических целей в тестах, что принесло пользу как начинающим, так и опытным хирургам.
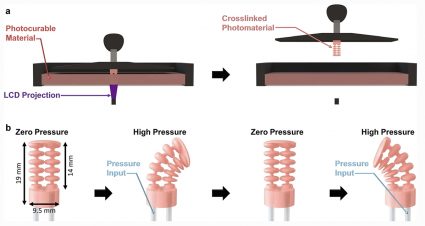
На рисунке показано изготовление и эксплуатация мягкого роботизированного наконечника катетера с использованием процесса печати для привода и пневматического давления для контроля изгиба катетера. Источник.
Роботизированная система повышает эффективность обработки птицы
Наконец, в мире продуктов питания исследователи представили инновационную роботизированную систему, предназначенную для эффективного извлечения и размещения деформируемых кусков птицы из захламленных контейнеров. Архитектура объединяет несколько модулей, что позволяет точно обрабатывать деликатные продукты из птицы. Предлагается всеобъемлющий подход к оценке производительности системы по различным модулям, который проливает свет на успехи и проблемы. Это достижение может революционизировать мясопереработку и пищевую промышленность в целом, отвечая требованиям повышенной автоматизации.
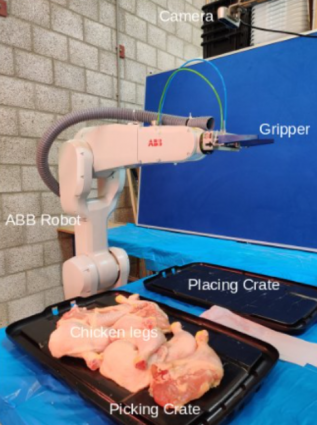
Экспериментальная установка. Источник.
Этот массив последних разработок, охватывающих различные области, демонстрирует универсальный и постоянно развивающийся характер технологии робототехники, открывая новые возможности для ее интеграции в различные сектора. Неуклонное развитие робототехники иллюстрирует продолжающиеся усилия и потенциальные последствия, которые эти достижения могут иметь в будущем.
Источники:
- Новый робот, созданный на основе биотехнологий, летает, перекатывается, ходит и многое другое. (2023, 27 июня). Центр автономных систем и технологий. Калифорнийский технологический университет.
- Применение планирования пути для системы помощи мобильным роботам на основе данных OpenStreetMap. Стар, П., Маас, Дж., и Гертнер, Х. (2023). Робототехника, 12(4), 113.
- Более простой метод обучения управлению роботом. (2023, 26 июля). Новости Массачусетского технологического института | Массачусетский Институт Технологий.
- Эффективное возвратно-поступательное копание с помощью анизотропных ножек-оригами. Ким, С., Трирс, Л.К., Ха, Т.М., и Стюарт, Х.С. (3 июля 2023 г.). Границы.
- Фенотипирование и скелетонизация для сельскохозяйственной робототехники. Институт робототехники Университета Карнеги-Меллона. (й). Проверено 10 августа 2023 г.
- Мягкие роботизированные катетеры с пневматическим управлением обеспечивают точность и гибкость. (й). Проверено 10 августа 2023 г.
- Усовершенствованная роботизированная система для эффективного захвата деформируемой птицы в захламленном бункере: комплексный подход к оценке. Раджа, Р., Буруса, А.К., Кутстра, Г., и ван Хентен, Э. (2023, 7 августа). ТехРвив.

Шонак Капур входит в команду волонтеров Robohub и скоро станет старшеклассником (Техас). Шон был очарован робототехникой с юных лет.
Шонак Капур входит в команду волонтеров Robohub и скоро станет старшеклассником (Техас). Шон был очарован робототехникой с юных лет.