
В октябре 2021 года мы объявили, что приобрели физический симулятор MuJoCo и сделали его бесплатным для всех, чтобы поддерживать исследования повсюду. Мы также стремимся развивать и поддерживать MuJoCo как бесплатный проект с открытым исходным кодом, управляемый сообществом, с лучшими в своем классе возможностями. Сегодня мы рады сообщить, что открытый исходный код завершен, и вся кодовая база на GitHub!
Здесь мы объясняем, почему MuJoCo является отличной платформой для совместной работы с открытым исходным кодом, и делимся предварительным обзором нашей дорожной карты на будущее.
Платформа для сотрудничества
Симуляторы физики являются важными инструментами в современных исследованиях робототехники и часто попадают в следующие две категории:
- Коммерческое программное обеспечение с закрытым исходным кодом.
- Программное обеспечение с открытым исходным кодом, часто созданное в академических кругах.
Первая категория непрозрачна для пользователя, и хотя иногда ее можно использовать бесплатно, ее нельзя изменить и ее трудно понять. Вторая категория часто имеет меньшую пользовательскую базу и страдает, когда ее разработчики и сопровождающие заканчивают обучение.
MuJoCo — один из немногих полнофункциональных симуляторов, поддерживаемых признанной компанией, который действительно имеет открытый исходный код. Как исследовательская организация, мы рассматриваем MuJoCo как платформу для сотрудничества, где робототехники и инженеры могут присоединиться к нам для разработки одного из лучших в мире симуляторов роботов.
Особенности, которые делают MuJoCo особенно привлекательным для сотрудничества:
- Полнофункциональный симулятор, который может модель сложный механизмы.
- Читаемый, производительный, переносимый код.
- Легко расширяемая кодовая база.
- Подробная документация: комментарии как для пользователя, так и для кода.
Мы надеемся, что коллеги из академических кругов и сообщества OSS получат пользу от этой платформы и внесут свой вклад в кодовую базу, улучшая исследования для всех.
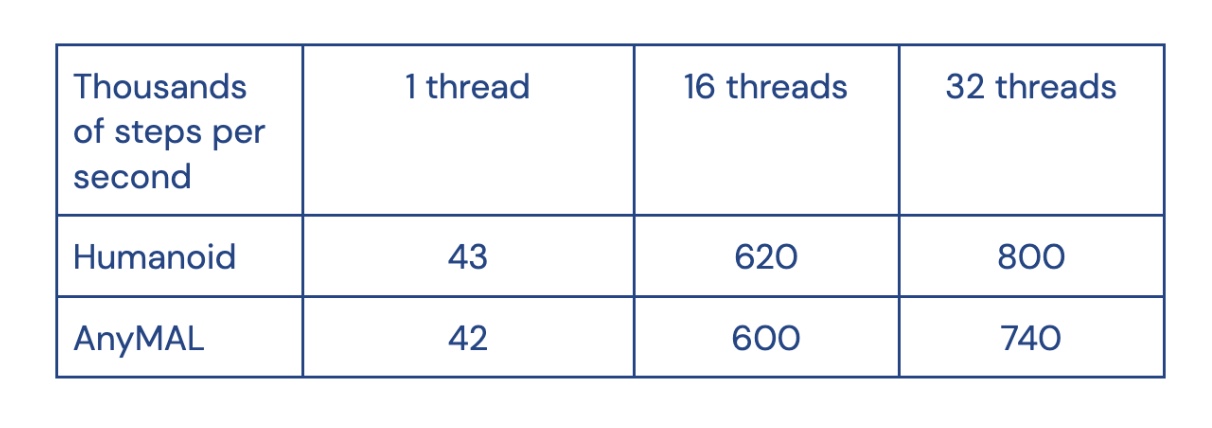
Производительность
Как библиотека C без динамического выделения памяти, MuJoCo работает очень быстро. К сожалению, скорости исходной физики исторически мешали оболочки Python, которые делали пакетные многопоточные операции неэффективными из-за наличия глобальной блокировки интерпретатора (GIL) и некомпилируемого кода. В нашей дорожной карте ниже мы решаем эту проблему в будущем.
А пока мы хотели бы поделиться некоторыми результатами тестирования двух распространенных моделей. Результаты были получены на стандартной машине AMD Ryzen 9 5950X под управлением Windows 10.
Дорожная карта
Вот наша ближайшая дорожная карта для MuJoCo:
- Раскройте потенциал скорости MuJoCo с помощью пакетного многопоточного моделирования.
- Поддержка больших сцен с улучшенным управлением внутренней памятью.
- Новый инкрементный компилятор с улучшенной компоновкой модели.
- Поддержка лучшего рендеринга благодаря интеграции с Unity.
- Встроенная поддержка физических производных, как аналитических, так и конечно-разностных.
Узнать больше
Полезные ресурсы о MuJoCo:
Мы с нетерпением ждем ваших взносов!